管致中《信号与线性系统》考研考点讲义.pdf
- 文件大小: 4.23MB
- 文件类型: pdf
- 上传日期: 2025-08-24
- 下载次数: 0
概要信息:
目 录
第一章 绪论 (2)
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
第二章 连续时间系统的时域分析 (7)
!!!!!!!!!!!!!!!!!!!!!!!!!
第三章 连续信号的正交分解 (16)
!!!!!!!!!!!!!!!!!!!!!!!!!!!
第四章 连续时间系统的频域分析 (23)
!!!!!!!!!!!!!!!!!!!!!!!!!
第五章 连续时间系统的复频域分析 (28)
!!!!!!!!!!!!!!!!!!!!!!!!
第六章 连续时间系统的系统函数 (39)
!!!!!!!!!!!!!!!!!!!!!!!!!
第七章 离散时间系统的时域分析 (45)
!!!!!!!!!!!!!!!!!!!!!!!!!
第八章 离散时间系统的变换域分析 (55)
!!!!!!!!!!!!!!!!!!!!!!!!
第九章 线性系统的状态变量分析 (66)
!!!!!!!!!!!!!!!!!!!!!!!!!
一、教材说明
信号与线性系统(第四版)
高等教育出版社 管致中 主编
二、辅导课阶段安排
1.教材重点、难点、考点精讲
2.名校考研真题及典型题的分类解析
3.课程内容的整体串讲及模拟试题分析
三、教材内容
第一章 绪论
第二章 连续时间系统的时域分析
第三章 连续信号的正交分解
第四章 连续时间系统的频域分析
第五章 连续时间系统的复频域分析
第六章 连续时间系统的系统函数
第七章 离散时间系统的时域分析
第八章 离散时间系统的变换域分析
第九章 线性系统的状态变量分析
—1—
管致中《信号与线性系统》考点精讲
第一章 绪论
【本章知识要点】
一、信号
1.信号的分类
2.信号的简单处理
(1)相加、相乘
(2)延时
(3)尺度变换
(4)反褶(反转)
二、系统
1.系统的描述
2.系统的分类
(1)线性/非线性系统
(2)时不变/时变系统
(3)连续时间/离散时间系统
(4)因果/非因果系统
一、信号
1.信号的分类
①信号
确定信号{
随机信号
②信号
连续信号{
离散信号
③信号
能量信号:E<
!
,P→0,E=lim
a→!
∫
a
-a
f(t)2dt
功率信号:P<
!
,E→0,P=lim
a→!
1
2a∫
a
-a
f(t)2{ dt
④信号
周期信号:
连续:f(t)=f(t+mT)
离散:f(k)=f(k+mN)(m=0,±1,±2{
,…)
(功率信号)
非周期信号:可能是
能量信号(脉冲信号)
功率信号(ε(t))
非能量 /非功率信号(tε(t
{{
))
—2—
周期信号的判别及周期T的确定
例:
1.f(t)=asint-bsin3t
(依据)周期信号的傅里叶级数展开:
f(t)=
a0
2+∑
!
n=1
(ancosnΩt+bnsinnΩt),Ω =
2π
T
若找出各角频率的最大公约数Ω,则T=2πΩ
若无法确定Ω,则f(t)为非周期信号
{
.
解 因为ω1 =1ω2 =3的最大公约数为Ω =1
故T=2π
Ω
=2π(s)
2.f(t)=asin(5πt2)+bcos(
6πt
5)+csin(
πt
7)
解 由于ω1 =
5π
2 =
175π
70ω2 =
6π
5 =
84π
70ω3 =
π
7 =
10π
70
的最大公约数为Ω =π70
故T=2π
Ω
=140(s)
3.f(t)=asin(3t)+bcos(πt)
解 ①π≈3,该信号为周期信号
②π≈3.141…,该信号为非周期信号
能量信号与功率信号的判别
例 1.f(t)=e-αtε(t),α>0.
2.f(t)=Acos(ω0t+θ)
2.信号的简单处理———都是针对时间“t”而变换的
①相加:f(t)=f1(t)+f2(t)
②相乘:f(t)=f1(t)·f2(t)
③时移:f(t)→f(t-t0)
④尺度变换:f(t)→f(at)
a>1:f(t)在t轴压缩到1a
0<a<1:f(t)在t轴扩展到1a
{ 倍
⑤反褶(反转):f(t)→f(-t)
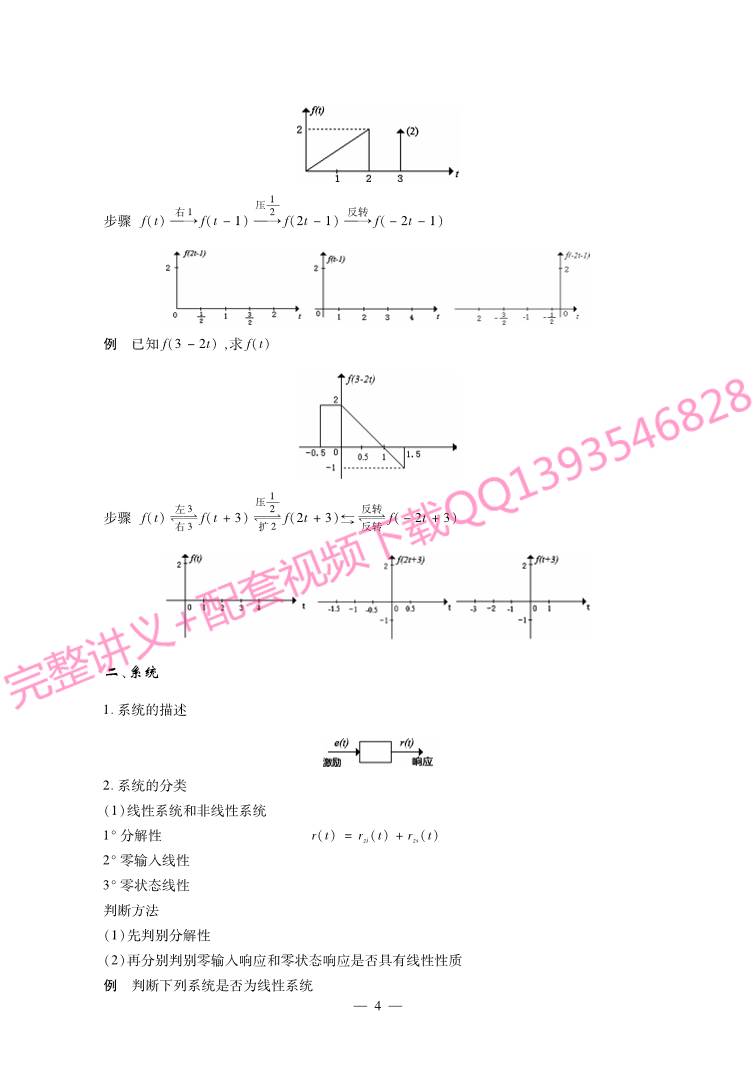
例 已知f(t),求f(-2t-1)。
—3—
管致中《信号与线性系统》考点精讲
步骤:f(t)
右
→
1
f(t-1)
压
→
1
2
f(2t-1) →
反转
f(-2t-1)
例 已知f(3-2t),求f(t)
步骤:f(t)
左3
右
幑幐3f(t+3)
压
1
2
扩
幑幐2f(2t+3)
反转
幑幐
反转
f(-2t+3)
二、系统
1.系统的描述
2.系统的分类
(1)线性系统和非线性系统
1°分解性 r(t)=rzi(t)+rzs(t)
2°零输入线性
3°零状态线性
判断方法:
(1)先判别分解性
(2)再分别判别零输入响应和零状态响应是否具有线性性质
例 判断下列系统是否为线性系统
—4—
1.r(t)=e-tx(0)+∫
t
0
sinxe(x)dx
2.r(t)=e(t)x(0)+∫
t
0
e(x)dx
3.r(k)=(0.5)kx(0)+e(k)e(k-2)
例 判断下列方程所描述的系统是否为线性系统
1.dr(t)dt +r(t)=e(t)+5
2.dr(t)dt +[r(t)]
2 =e(t)
3.dr(t)dt +tr(t)+5∫
t
-
!
r(τ)dτ=de(t)dt +e(t)
依据:在激励k1e1(t)+k2e2(t)作用时,判断系统的响应是否为
k1r1(t)+k2r2(t)
(2)时不变系统和时变系统
若e(t)→rzs(t)
则e(t-t0)→rzs(t-t0)
判断方法:先经系统再时移=先时移再经系统
例 判断下列两个系统是否为时不变系统
1.r(t)=cos[e(t)] 2.r(t)=e(t)·cost
例 判断下列方程所描述的系统是否为时不变系统
1.dr(t)dt +3r(t)=e(t)
2.d
2r(t)
dt2
+tddtr(t)+r(t)=2e(t)
3.r(k)+4r(k-1)+4r(k-2)=e(k-1)
4.r(k)+4r(k-1)+r(k-1)r(k-2)=e(k-1)
结论:若系统方程为常系数微分(差分)方程,则系统是时不变的。
(3)连续时间系统和离散时间系统
(4)因果系统和非因果系统
判断方法:响应不可能出现于激励之前
例 r(t)=2e(t-3)所描述的系统为因果系统
r(t)=2e(t+3)所描述的系统为非因果系统
例 一具有两个初始条件x1(0)、x2(0)的线性时不变系统,其激励为 e(t),输出响应为 r(t)。
已知:
(1)当e(t)=0,x1(0)=5,x2(0)=2时r(t)=e
-t(7t+5),t>0
—5—
管致中《信号与线性系统》考点精讲
(2)当e(t)=0,x1(0)=1,x2(0)=4时r(t)=e
-t(5t+1),t>0
(3)当e(t)=
1,t>0
0,t<{ 0
,x1(0)=1,x2(0)=1时r(t)=e
-t(t+1),t>0
求:e(t)=
3,t>0
0,t<{ 0
时的零状态响应。
—6—
第二章 连续时间系统的时域分析
本章知识要点
一、线性时不变系统的响应
古典解{
卷积解
二、奇异函数ε(t),δ(t),δ′(t)
三、冲激响应h(t)
四、卷积积分
一、线性时不变系统的响应
1.古典解
dnr
dtn
+an-1
dn-1r
dtn-1
+… +a1
dr
dt+a0r=bm
dme
dtm
+bm-1
dm-1e
dtm-1
+… +b1
de
dt+b0e(2-1)
———n阶线性常系数微分方程
r(t)=齐次解+特解
=自由响应+强迫响应
=零输入响应+零状态响应
(1)零输入响应rzi(t)
① 转移算子H(p)
令
d
dt=p,
dn
dtn
=pn
则式(2-1)表示为
pnr+an-1p
n-1r+… +a1pr+a0r=bmp
me+bm-1p
m-1e+… +b1pe+b0e
(pn+an-1p
n-1+… +a1p+a0)r
D(p) =
(bmp
m +bm-1p
m-1+b1p+b0)e
N(p)
故
D(p)r(t)=N(p)e(t)
r(t)=N(p)D(p)e(t)
定义:转移算子H(p)=N(p)D(p)=
bmp
m +bm-1p
m-1+… +b1p+b0
pn+an-1p
n-1+… +a1p+a0
②rzi(t)的求解
D(p)r(t)=0———齐次方程
—7—
管致中《信号与线性系统》考点精讲
D(p)=0特征根λ1,λ2,…,λn(设均为单根)
故r(t)=C1eλ1
t+C2eλ2
t+… +Cneλn
t
其中C1,C2,…Cn由n个初始条件确定。
说明:λi(i=1,…,n)称为响应中的自然频率
例1 已知系统的转移算子H(p)= p+3
p2+3p+2
,未加激励的初始条件r(0)=1、r′(0)=2,求
该系统的零输入响应,并指出自然频率。
(2)零状态响应rzs(t)
D(p)r(t)=N(p)e(t)
对于较复杂的激励e(t),求rzs(t)需要求解复杂的非齐次方程,计算量大,不常采用。
2.卷积解
rzs(t)主要用卷积积分的方法来求,该部分在后续内容中详细讲解。
二、奇异函数ε(t),δ(t),δ′(t)
1.单位阶跃函数ε(t)
ε(t)=
1 t>0
不定义 t=0
0 t<
{
0
说明:
应用:用ε(t)及ε(t-ti)表示信号
例2:
2.单位冲激函数δ(t)
—8—
定义:
δ(t)=0,t≠0
δ(t)=!
,t=0
∫
!
-
!
δ(t)dt=
1
性质:①
dε(t)
dt =δ(t)
∫
t
-
!
δ(τ)dt=ε(t
{
)
②∫
!
-
!
δ(t)dt=1
③δ(t)=δ(-t)
④f(t)δ(t)=f(0)δ(t)
f(t)δ(t-t0)=f(t0)δ(t-t0)
⑤
∫
!
-
!
f(t)δ(t)dt=f(0)
∫
!
-
!
f(t)δ(t-t0)dt=f(t0
}
)
取样性
⑥δ(at)= 1
aδ(t)
3.冲激偶δ′(t)
性质:①δ′(-t)=-δ′(t)
②f(t)δ′(t)=f(0)δ′(t)-f′(0)δ(t)
③∫
!
-
!
δ′(t)dt=0
④∫
t
-
!
δ′(τ)dτ=δ(t)
例3 (1)y1(t)=t
d
dt[e
-tε(t)]
(2)y2(t)=∫
!
-
!
e-t[δ(t)+δ′(t)]dt
(3)y3(t)=∫
t
-
!
(4+τ3)δ(1-τ)dτ
—9—
管致中《信号与线性系统》考点精讲
(4)y4(t)=∫
t
-
!
(e-τ+τ)δ(τ2)dτ
三、冲激响应h(t)
1.定义
2.求解
(1)一般情况:
h(n)(t)+an-1h
(n-1)(t)+… +a1h′(t)+a0h(t)=δ(t)
h(0-)=h′(0-)=… =h(n-1)(0-)=0 t0
则
h(n-1)(0+)=1
h(n-2)(0+)=…h′(0+)=h(0+)=0
(2)h(n)(t)+an+1h
(n-1)+… +a1h′(t)+a0h(t)=bmδ
(m)(t)+bm-1δ
(m-1)(t)+… +b1δ′(t)+
b0δ(t)
第一步:先求h(n)1 (t)+an-1h
(n-1)
1 (t)+… +a1h′1(t)+a0h1(t)=δ(t)得到h1(t)
第二步:利用线性时不变系统的齐次性,可加性和微分性质,
有 h(t)=bmh1
(m)(t)+bm-1h
(m-1)
1 (t)+… +b1h1′(t)+b0h1(t)
例 已知系统的微分方程为r″(t)+3r′(t)+2r(t)=e(t)+4e″(t)-5e(t)求冲激响应h(t)。
解 特征根λ1 =-1λ2 =-2
设δ(t)单独作用的冲激响应为h1(t),则h1(t)=(C1e
-t+C2e
-2t)ε(t)
又h′1(0+)=1h1(0+)=0
故
C1+C2 =0
-C1-2C2 =
{ 1
∴C1 =1C2 =-1
∴h1(t)=(e
-t-e-2t)ε(t)
系统的冲激响应为
h(t)=h1(t)+4h″1(t)-5h1(t)
=δ′(t)-3δ(t)+(8e-2t-e-t)ε(t)+4δ(t)+(4e-t-16e-2t)ε(t)-(5e-t-5e-2t)ε(t)
=δ′(t)+δ(t)-3e-2tε(t)-2e-tε(t)
练习:
(1)求系统 d
dtr(t)+3r(t)=2
d
dte(t)的冲激响应
(2)求系统 d
3
dt3
r(t)+d
2
dt2
r(t)+2ddtr(t)+2r(t)=
d2
dt2
e(t)+2e(t)的冲激响应。
—01—
3.阶跃响应rε(t)
(1)定义:
(2)求解:
ε(t)=∫
t
-
!
δ(τ)dτ→rε(t)=∫
t
-
!
h(τ)dτ=∫
t
0-
h(τ)dτ
例 求上题中的rε(t)。
四、卷积积分
1.叠加积分
e(t)=∫
!
-
!
e(τ)δ(t-τ)dt
=e(t)δ(t)
∫
!
-
!
e(τ)h(t-τ)dτ=rzs(t)
e(t)h(t)=rzs(t)
即 rzs(t)=e(t)h(t)=∫
!
-
!
e(τ)h(t-τ)———卷积积分
2.卷积积分的定义
f(t)=f1(t)f2(t)=∫
!
-
!
f1(τ)f2(t-τ)dτ
3.卷积积分的物理意义
r(t)=∫
!
-
!
e(τ)h(t-τ)dτ
系统的零状态响应等于系统的激励与系统冲激响应的卷积积分。
4.卷积积分的性质
(1)卷积的代数运算
①交换律f1(t)f2(t)=f2(t)f1(t)
②分配律f1(t)[f2(t)+f3(t)]=f1(t)f2(t)+f1(t)f3(t)
③结合律[f1(t)f2(t)]f3(t)=f1(t)[f2(t)f3(t)]
(2)函数与冲激函数的卷积
f(t)δ(t)=δ(t)f(t)=∫
!
-
!
δ(τ)f(t-τ)dτ=f(t)
f(t)δ(t-t1)=f(t-t1)
f(t-t1)δ(t-t2)=f(t-t1-t2)
(3)卷积的微分与积分
①卷积的微分:若f(t)=f1(t)f2(t)=f2(t)f1(t)
—11—
管致中《信号与线性系统》考点精讲
则
df(t)
dt =
df1(t)
dtf2(t)=
df2(t)
dtf1(t)
②卷积的积分:
若f(t)=f1(t)f2(t)=f2(t)f1(t)
则∫
t
-
!
f(x)dx=[∫
t
-
!
f1(x)dx]f2(t)=[∫
t
-
!
f2(x)dx]f1(t)
f(t)ε(t)=f(t)∫
t
-
!
δ(τ)dτ=∫
t
-
!
f(τ)dτ
③卷积的微分与积分:
f1(t)f2(t)=
d
dtf1(t)∫
t
-
!
f2(x)dx=[∫
t
-
!
f1(x)dx]
d
dtf2(t)
④函数延时后的卷积
若f1(t)f2(t)=f(t)
则f1(t-t1)f2(t-t2)=f(t-t1-t2)
5.卷积积分的计算
(1)用定义求
例 ①求ε(t)ε(t)
②求e-2tε(t)e-3tε(t)
练习:求ε(t)eλtε(t)
(2)图解法
f(t)=f1(t)f2(t)=∫
!
-
!
f1(τ)f2(t-τ)dτ
步骤:
①f1(t)→f1(τ)
②f2(t)→f2(τ) →
反褶
f2(-τ) →
时延
f2(t-τ)
③ 求∫
!
-
!
f1(τ)f2(t-τ)dτ
例 f1(t)=
1, t<1
0, t>{ 1
,f2(t)=
t
2(0"t"3),求f1(t)f2(t)。
解 ①t"-1
—21—
f1(τ)·f2(t-τ)=0
故f1(t)f2(t)=∫
!
-
!
f1(τ)f2(t-τ)dτ=0
② -1"t"1
f2(t-τ)=
t-τ
2
故f1(t)f2(t)=∫
t
-1
1·t-τ2 dτ=(
tτ
2-
τ2
4)
t
-1
=t
2
4+
t
2+
1
4
③1"t"2
t-3≤-1
t≥{ 1
1≤t≤2
f1(t)f2(t)=∫
1
-1
1·t-τ2 dτ=t
④2"t"4
-1≤t-3≤1
t≥{ 1
2≤t≤4
f1(t)f2(t)=∫
1
t-3
1·t-τ2 dt=-
t2
4+
t
2+2
—31—
管致中《信号与线性系统》考点精讲
⑤t4
f1(t)f2(t)=0
波形:
f1(t)f2(t)=
t2
4+
t
2+
1
4, -1
"
t
"
1
t, 1
"
t
"
2
-t
2
4+
t
2+2, 2
"
t
"
4
0, 其它
t
说明:积分上下限和卷积结果区间的确定
1.积分上下限:由f1(τ)·f2(t-τ)≠0的范围确定
2.卷积结果区间
一般规律:
下限 上限
f1(t) [A B]
f2(t) [C D]
f1(t)f2(t) [A+C B+D]
例 已知f1(t),f2(t)的波形,令f(t)=f1(t)f2(t),试求f(3)。
(3)用性质求
例 ①求ε(t-1)ε(t-5)
②已知e(t),h(t),求r(t)=e(t)h(t)。
—41—
—51—
管致中《信号与线性系统》考点精讲
第三章 连续信号的正交分解
【本章知识要点】
一、周期信号的分析———傅里叶级数
二、非周期信号的分析———傅里叶变换
定义
常用变换对{
性质
三、周期信号的傅里叶变换
四、帕塞瓦尔定理
一、周期信号的分析———傅里叶级数
1.三角傅里叶级数
f(t)=
a0
2+∑
!
n=1
[ancos(nΩt)+bnsin(nΩt)]
=
a0
2+∑
!
n=1
Ancos(nΩt+φn)
Ω =2πT:基波频率
T:周期
nΩ:谐波频率
a0
2:直流分量
任意一个代表信号的函数可以用直流分量和一系列谐波分量之和来表示。
an =
2
T∫
t1+T
t1
f(t)cos(nΩt)dta0 =
2
T∫
t1+T
t1
f(t)dt
bn =
2
T∫
t1+T
t1
f(t)sin(nΩt)dt(n=1,2,3…)
an =Ancosφn
bn =-Ansinφ
{
n
An = a2n+b
2
槡 n
φn =-arctan(
bn
an
{ )
an =a-n
bn =-b
{
-n
An =A-n(幅度频谱)
φn =-φ-n(相位频谱
{
)
说明:只有函数f(t)满足Dirichlet条件时,f(t)才可以分解为谐波分量。
—61—
例 试画出f(t)=1+2sinπt-3cos(3πt-π6)+4cos(5πt+
π
3)的单边谱。
2.指数傅里叶级数
f(t)=12∑
!
n=-
!
An
·
ejnΩt
其中An
·
=Ane
jφn =2T∫
t1+T
t1
f(t)e-jnΩtdt
An =A-n(双边幅度谱)
φn =-φ-n(双边相位谱
{
)
例
说明:周期信号频谱的特点:离散性、谐波性、收敛性。
3.函数的偶、奇性及其与谐波含量的关系
(1)f(t)为偶函数f(t)=f(-t)
an =
2
T∫
t1+T
t1
f(t)cos(nΩt)dt
bn =
}
0
包含直流分量,余弦分量
(2)f(t)为奇函数f(t)=-f(-t)
—71—
管致中《信号与线性系统》考点精讲
an =0a0 =0
bn =
2
T∫
t1+T
t1
f(t)sin(nΩt) }dt包含正弦分量
(3)f(t)为奇谐函数f(t)=-f(t+T2)
n为奇数:an≠0,bn≠0
n为偶数:an =bn =
}0
只包含奇次谐波分量
(4)f(t)为偶谐函数f(t)=f(t+T2)
n为偶数:an≠0bn≠0
n为奇数:an =bn =
}0 只包含偶次谐波分量
例 利用信号的奇偶性,判断下图中信号的傅里叶级数所包含的分量。
例 已知周期信号f(t)前四分之一周期的波形,按以下条件绘出整个周期的信号波形:f(t)是t
的偶函数,其傅里叶级数只有偶次谐波。
二、非周期信号的分析———傅里叶变换
1.定义
F(jω)=∫
!
-
!
f(t)e-jωtdt
f(t)= 12π∫
!
-
!
F(jω)ejωtdω
f(t)F(jω)
—81—
频谱密度函数F(jω)= F(jω)ejφ(ω)
说明:非周期信号f(t)傅里叶变换存在的充分条件:∫
!
-
!
f(t)dt<!
2.常用傅里叶变换对
(1)δ(t)1
(2)12πδ(ω)
(3)δ′(t)jω
(4)ε(t)πδ(ω)+1jω
(5)e-αtε(t) 1
α+jω
(α>0)
(6)e-α tε(t) 2α
α2+ω2
(α>0)
(7)gτ(t)τSa(
ωτ
2)
(8)sgn(t) 2jω
(9)cosω0tπ[δ(ω+ω0)+δ(ω-ω0)]
sinω0tjπ[δ(ω+ω0)-δ(ω-ω0)]
3.傅里叶变换的性质
(1)线性 a1f1(t)+a2f2(t)a1F1(jω)+a2F2(jω)
(2)延时f(t±t0)F(jω)e
±jωt0
(3)移频f(t)ejωctF[j(ω-ωc)]
应用:f(t)cosωct
1
2 F[j(ω+ωc)]+F[j(ω-ωc
{ })]
f(t)sinωctj
1
2 F[j(ω+ωc)]-F[j(ω-ωc
{ })]
例 求该信号的傅里叶变换
f1(t)=g2π(t)cos(5t)
(4)尺度变换
—91—
管致中《信号与线性系统》考点精讲
f(at) 1
aF(j
ω
a)
例 求e-2tε(t+1)的傅里叶变换
(5)奇偶性
F(jω)的奇偶性
F(jω)=∫
!
-
!
f(t)e-jωtdt=∫
!
-
!
f(t)cos(ωt)dt-j∫
!
-
!
f(t)sin(ωt)dt
=R(ω)+jX(ω)
= F(jω)ejφ(ω)
① ②
R(ω)=R=(-ω)
X(ω)=-X(-ω{
)
F(jω) = F(-jω)
φ(ω)=-φ(-ω{
)
(6)对称性 若f(t)F(jω) 则F(jt)2πf(-ω)
例1 求Sa(πt)的傅里叶变换
例2 求 1t的傅里叶变换
例3 求 2α
α2+t2
的傅里叶变换
(7)时域微分
df(t)
dtjωF(jω)
dnf(t)
dtn
(jω)nF(jω)
例1 δ′(t)jω
例2 求三角函数的频谱密度函数
(8)时域积分
∫
t
-
!
f(τ)dτπF(0)δ(ω)+F(jω)jω
—02—
若F(0)=0, 则∫
t
-
!
f(τ)dτF(jω)jω
其中F(0)=F(jω)ω=0 =∫
!
-
!
f(t)dt
例 求f(t)的傅里叶变换
(9)频域微分(-jt)f(t)dF(jω)dω
例 求tε(t)的傅里叶变换
(10)卷积定理
时域卷积定理:f1(t)f2(t)F1(jω)F2(jω)
频域卷积定理:f1(t)f2(t)
1
2π
F1(jω)F2(jω)
例1 求下图信号的傅里叶变换
例2 利用频域卷积定理求cos(ωct)ε(t)的傅里叶变换
三、周期信号的傅里叶变换
F(jω)=π∑
!
n=-
!
An
·
δ(ω-nΩ)Ω =2πT
周期信号的频谱函数是一个冲激序列,各个冲激位于各次谐波频率处,各冲激的强度分别等于各
次谐波复振幅的π倍。
例 求δT(t)的傅里叶变换
练 求f(t)的傅里叶变换
—12—
管致中《信号与线性系统》考点精讲
四、帕塞瓦尔定理
1.周期信号的功率
P=f2(t)=(
A0
2)
2
+12∑
!
n=1
A2n =∑
!
n=-
!
(
An
2)
2
周期信号的平均功率在各次谐波中分布,其功率等于直流功率与各次谐波功率之和。
2.非周期信号的能量
W =∫
!
-
!
f2(t)dt= 12π∫
!
-
!
F(jω)
2
dω
例 已知f(t)的频谱函数为F(jω),求下列各值。
(1)∫
!
-
!
F(jω)dω
(2)∫
!
-
!
F(jω)2dω
—22—
第四章 连续时间系统的频域分析
【本章知识要点】
一、频率响应H(jω)及在系统分析中的应用
二、调制与解调
三、无失真传输条件
一、频率响应H(jω)及在系统分析中的应用
1.频率响应H(jω)
(1)定义
E(jω)·H(jω)=R(jω)
H(jω)=R(jω)E(jω)
=F[h(t)] H(jω)= H(jω)ejφ(ω)
H(jω) ~ω幅频响应
φ(ω)~ω{
相频响应
(2)求解方法
①已知系统方程r″(t)+3r′(t)+2r(t)=2e′(t)+3e(t)
②已知系统结构
2.零状态响应
Rzs(jω)=E(jω)·H(jω)
rzs(t)=F
-1[Rzs(jω)]
例1 某系统的输入e(t)与输出rzs(t)的关系为rzs(t)=
1
π∫
!
-
!
e(τ)
t-τ
dτ
(1)求系统的频率响应H(jω)
—32—
管致中《信号与线性系统》考点精讲
(2)证明rzs(t)与e(t)的能量相等
例2 已知H(jω)= H(jω)ejφ(ω),激励e(t)=2+∑
!
n=1
1
ncos(nt)求零状态响应r(t)。
例3 求e(t)=sin(2πt)2πt
的信号通过图(a)系统后的输出,系统中理想带通滤波器的传输特性如
图(b)示,其相位特性φ(ω)=0。
例4 如图所示系统,已知h1(t)=
d
dt[
sin(2t)
2πt
],H2(jω)=e
-jπω
h3(t)=ε(t),h4(t)=
sin(6t)
πt
。
(1)求复合系统的频率响应H(jω)和冲激响应h(t);
(2)若输入e(t)=sin(4t)+cos(t),求系统的零状态响应r(t)。
二、调制与解调
1.调制与解调的概念
① 调制:由待传输的低频电信号(调制信号),去控制另一个高频振荡信号的振幅、频率或初相位
等参数之一。
a0(t)=A0cos(ωct+φ0)
幅度调制(AM):用调制信号去控制高频振荡信号的振幅,使振幅不再是常数,而是按调制信号的
规律在变化,该调变振幅的过程成为~。
频率调制(FM):调变的是高频振荡信号的频率
相位调制(PM):调变的是高频振荡信号的初相位
另外:脉冲调制:用调制信号去控制一个脉冲序列的脉冲幅度,脉冲宽度或脉冲位置等参数之一。
说明:
a0(t)=A0cos(ωct+φ0)———载波
—42—
ωc =2πfc———载频
② 解调:从已调信号中恢复或取出调制信号的过程,是调制的逆过程。
2.抑制载频调幅(AM-SC)
①调制:
a(t)=e(t)cos(ωct)
A(jω)=12 E[j(ω+ωc)]+E[j(ω-ωc
{ })]
频谱图:
频带宽度:BA =2ωm
② 解调:
c(t)=12e(t)
b(t)=a(t)cosωct=e(t)cos
2(ωct)=
1
2[e(t)+e(t)cos(2ωct)]
B(jω)=12A[j(ω+ωc)]+
1
2A[j(ω-ωc)]
=14E[j(ω+2ωc)]+
1
2E(jω)+
1
4E[j(ω-2ωc)]
—52—
管致中《信号与线性系统》考点精讲
说明:调制解调中的载波必须严格地同频同相,否则无法恢复原信号的频谱结构,从而发生信号
失真。
3.振幅调制(AM)
a(t)=[A0+e(t)]cos(ωct)=A0cos(ωct)+e(t)cos(ωct)
A(jω)=πA0[δ(ω+ωc)+δ(ω-ωc)]+
1
2E[j(ω+ωc)]+
1
2E[j(ω-ωc)]
频带宽度BA =2ωm
说明:A0 e(t)max
若e(t)=∑
n
1
Enmcos(Ωnt+φn)
则 a(t)=[A0+e(t)]cos(ωct)
=[A0+∑
n
1
Enmcos(Ωnt+φn)]cos(ωct)
=A0[1+∑
n
1
mncos(Ωnt+φn)]cos(ωct)
mn =
Enm
A0
:表示调制信号中n次谐波分量对载频幅度控制程度,
称为部分调幅系数。
令φn =0 则e(t)=∑
n
1
Enmcos(Ωnt)
—62—
E(jω)=∑
n
1
πEnm[δ(ω+Ωn)+δ(ω-Ωn)]
调幅信号的频谱
A(jω)=πA0[δ(ω+ω0)+δ(ω-ωc)]+∑
n
1
πEnm
2 [δ(ω+Ωn+ωc)+δ(ω+Ωn-ωc)]
+∑
n
1
πEnm
2 [δ(ω-Ωn+ωc)+δ(ω-Ωn-ωc)]
调幅信号的功率:载频功率Pc=
1
2A0
2
边频功率Ps=∑
!
1
m2n
2Pc
例 有一调幅信号为a(t)=A[1+0.3cos(ω1t)+0.1cos(ω2t)]sin(ωct),其中:ω1=2π×5×
103rad/s、ω2 =2π×3×10
3rad/s、ωc =2π×45×10
6rad/sA=100V,试求:
(1)部分调幅系数;
(2)此调幅信号加到1kΩ电阻上产生的平均功率、载波功率与边频功率。
三、无失真传输条件
r(t)=Ke(t-t0)
无失真传输的条件:
1.时域:h(t)=Kδ(t-t0)
2.频域:H(jω)=Ke-jωt0
H(jω) =K
φ(ω)=-ωt{
0
—72—
管致中《信号与线性系统》考点精讲
第五章 连续时间系统的复频域分析
【本章知识要点】
一、单边拉普拉斯变换
二、常用信号的F(s)
三、拉普拉斯变换的基本性质
四、拉普拉斯反变换
五、线性系统的拉普拉斯变换分析法
六、双边拉普拉斯变换
七、信号流图
八、系统模拟
一、单边拉普拉斯变换
为什么引入拉普拉斯变换?
1.定义
F(s)=∫
!
0
f(t)e-stdt
f(t)=[12πj∫
σ+j!
σ-j!
F(s)estds]ε(t)
或f(t)F(s)
2.收敛区(收敛域)
把f(t)e-σt满足绝对可积的σ值的范围称为收敛区通常f(t)是指数阶函数且有分段连续的性质
单边拉普拉斯变换的收敛区为某条直线的右半边平面
—82—
lim
t→!
f(t)e-σt=0?,σ>σ0
σ>σ0:收敛条件
σ0:收敛坐标
(1)单个脉冲信号:
收敛区为全S平面
(2)单位阶跃信号
lim
t→!
[ε(t)e-σt]=0?,σ>0
(3)指数函数eαt
lim
t→!
[eαt·e-σt]=lim
t→!
e(α-σ)t=0?,σ>α
二、常用信号的F(s)
若f(t)的拉普拉斯变换收敛区包括jω轴在内,则F(s)=F(jω)jω=s;若f(t)的拉普拉斯变换收
敛区不包括jω轴在内,则F(s)必须由积分式求得。
1.δ(t)1
2.eαtε(t) 1
s-α
3.ε(t) 1s
4.tnε(t) n!
sn+1
5.tε(t) 1
s2
,t2ε(t) 2
s3
6.sin(βt)ε(t) β
s2+β2
7.cos(βt)ε(t) s
s2+β2
8.sinh(βt)ε(t) β
s2-β2
9.cosh(βt)ε(t) s
s2-β2
10.δ′(t)s
三、拉普拉斯变换的基本性质
1.线性
设f1(t)F1(s)f2(t)F2(s),
则a1f1(t)+a2f2(t)a1F1(s)+a2F2(s)
例 求δ(t)+e-2tε(t)的拉普拉斯变换
—92—
管致中《信号与线性系统》考点精讲
2.尺度变换
设f(t)F(s),则f(at) 1aF(
s
a),(a>0)
例 求f(t)=cos(2t)ε(t)的拉普拉斯变换
3.时间平移
设f(t)F(s),则f(t-t0)ε(t-t0)F(s)e
-st0,t00
例 求下图中f(t)的拉普拉斯变换
4.频率平移
设f(t)F(s),则f(t)es0tF(s-s0)
例1 已知tε(t) 1
s2
,则e-ttε(t)
例2 已知cos(2t)ε(t) s
s2+4
,则e-2tcos(2t)ε(t)
5.时域微分
设f(t)F(s)
则
dnf(t)
dtn
snF(s)-sn-1f(0-)-s
n-2f′(0-)-… -f(n-1)(0-)df(t)dtsF(s)-f(0-)
d2f(t)
dt2
s2F(s)-sf(0-)-f′(0-)
若f(t)为因果信号,即t<0时f(t)=0,则 d
nf(t)
dtn
snF(s)
例 求f(t)=d
2
dt2
[sin(πt)ε(t)]的拉普拉斯变换
6.时域积分
设f(t)F(s),则∫
t
0
f(τ)dτF(s)s
∫
t
-
!
f(τ)dτF(s)s +
∫
0
-
!
f(τ)dτ
s
—03—
例 求f(t)的拉普拉斯变换
7.复频域微分
设f(t)F(s),则(-t)f(t)dF(s)ds
例 求t2e-tε(t)的拉普拉斯变换
8.初值定理
(1)设f(t)及f′(t)存在,并有拉普拉斯变换,则
f(0+)=lim
t→0+
f(t)=lim
s→!
sF(s)(F(s):真分式)
(2)若f(t)在t=0处有冲激及其导数,则
f(t)a0+a1s+… +aps
p+Fp(s) (Fp(s):真分式)
那么f(0+)=lim
s→!
sFp(s)
9.终值定理
设f(t)及f′(t)存在,并有拉普拉斯变换,且F(s)的所有极点都位于s左半平面内(包括在原点
处的单极点)
则f(
!
)=lim
t→!
f(t)=lim
s→0
sF(s)
例 求F(s)= 2s+3
(s+1)2
原函数的初值f(0+)和终值f(!)
10.卷积定理
时域卷积:f1(t)f2(t)F1(s)·F2(s)
复频域卷积:f1(t)f2(t)
1
2πj
F1(s)F2(s)
应用:rzs(t)=e(t)h(t)
Rzs(s)=E(s)H(s)
四、拉普拉斯反变换
f(t)=[12πj∫
σ+j!
σ-j!
F(s)estds]ε(t)
1.部分分式展开法(F(s)为有理函数)
2.留数法(围线积分法)
—13—
管致中《信号与线性系统》考点精讲
1.部分分式展开法
F(s)=N(s)D(s)=
bms
m +bm-1s
m-1+… +b1s+b0
sn+an-1s
n-1+… +a1s+a0
mn:F(s)表示为多项式与真分式之和 (长除法)
m<n:F(s)为真分式,直接用该方法。
例 长除法F(s)=3s
3+2s2-4s+2
s2+2s+2
多项式:其原函数为冲激函数及其各阶导数之和。
(1)m<n,D(s)=0的根无重根情况
F(s)=
K1
s-s1
+… +
Ki
s-si
+···+
Kn
s-sn
=∑
n
i=1
Ki
s-si
Ki=(s-si)F(s)s=si
f(t)=∑
n
i=1
Kie
sitε(t)
例1 求F(s)= s+4
s3+3s2+2s
的原函数f(t)
例2 求F(s)= s
s2+2s+5
的原函数f(t)
例3 求F(s)= 2
(s+1)(s2+1)
的原函数f(t)
练 求F(s)= s+10
s2+10s+50
的原函数f(t)
(2)m<n,D(s)=0的根有重根的情况设D(s)=0有p阶重根S1
F(s)=N(s)D(s)=
N(s)
(s-s1)
p =
K1p
(s-s1)
p+
K1(p-1)
(s-s1)
p-1+… +
K1k
(s-s1)
k+… +
K11
(s-s1)
其中K1k =
1
(p-k)!
dp-k
dsp-k
[(s-s1)
pF(s)]
s=s1
K1k
(s-s1)
k
K1k
(k-1)!t
k-1es1tε(t)
特例:p=2
K12 =(s-s1)
2F(s)s=s1
K11 =
d
ds[(s-s1)
2F(s)] s=s1
例 求F(s)= 1
s(s-1)2
的原函数f(t)
—23—
2.留数法(围线积分法)———真分式
f(t)= 12πj∫
σ+j!
σ-j!
F(s)estds
当 s=R→ !
?,F(s)→0
f(t)= 12πj∮cF(s)estds=∑
n
i=1
Resi
左边的积分:S平面内沿一不通过被积函数极点的封闭曲线C进行
等式右边:围线C{
中被积函数各极点上留数之和
t>0时 f(t)= 12πj∫
σ+j!
σ-j!
F(s)estds=∑
n
i=1
Resi
t<0时 f(t)=
{
0
∴f(t)=∑
n
i=1
Resiε(t)
(1)F(s)为有理函数,在s=sk为一阶极点时,其留数为:
Resk =[(s-sk)F(s)e
st]s=sk
(2)F(s)为有理函数,在s=sk为p阶极点时,其留数为:
Resk =
1
(p-1)![
dp-1
dsp-1
(s-sk)
pF(s)est]
s=sk
例 (1)F(s)= 24(s+8)
s(s+12)(s+4)
(2)F(s)= 4s
2+17s+16
(s+2)2(s+3)
结合拉普拉斯变换的基本性质求反变换。
例1 求(1-e
-s
s )
2
的拉普拉斯反变换
例2 求下列函数的拉普拉斯反变换
(1)1+e
-s
s+1
(2) 1
1+e-s
(3)(1-e
-s
s )
2
—33—
管致中《信号与线性系统》考点精讲
·m=2f(k-2)ε(k)z-2F(z)+z-1f(-1)+f(-2)
例1 y(k)-y(k-1)-2y(k-2)=f(k)+2f(k-2)k0,已知y(-1)=2y(-2)=-12f(k)
=ε(k),求yzi(k)yzs(k)及y(k)。
例2 2y(k+2)+3y(k+1)+y(k)=f(k),已知y(0)=0,y(1)=-1,f(k)=(0.5)kε(k)
求yzi(k),yzs及y(k)。
注意:初始条件(二阶系统)
后向差分方程:y(-1),y(-2)
前向差分方程:y(0),y(1)
练习 y(k)+3y(k-1)+2y(k-2)=f(k)-f(k-1),y(0)=1,y(1)=1
f(k)=ε(k)。求yzi(k),yzs(k)及y(k)。
2.系统的零状态响应.
3.系统函数H(z)
(1)定义H(z)=
Yzs(z)
F(z)
(2)系统函数的零点和极点
H(z)=
bmz
m +bm-1z
m-1+… +b1z+b0
anz
n+an-1z
n-1+… +a1z+a0
=H0
(z-z1)…(z-zm)
(z-p1)…(z-pn)
=H0
∏
m
i=1
(z-zi)
∏
n
j=1
(z-pi)
其中:zi:系统函数的零点 pj:系统函数的极点
(3)系统函数的求法
① 对零状态系统的差分方程做z变换即可求得H(z)
例1 y(k)+4y(k-1)+4y(k-2)=f(k)+2f(k-1)求H(z)
例2 2y(k+2)+3y(k+1)+y(k)=2f(k+1)求H(z)
② 根据H(z)的零极点及附加条件求H(z)
例 已知H(z)的零点为0,-2±j1,极点在 -3,-1±j3且H(-2)=-1求H(z)
③ 由系统的z域模拟图求H(z)
④ 有信号流图根据梅森公式求H(z),即H=1Δ∑i PiΔi
—06—
(4)系统函数的应用
① 求h(k): h(k)H(z)
② 求yzs(k): yzs(k)H(z)·F(z)
例 若f1(k)=ε(k)-ε(k-2)则yzsi(k)=2ε(k),求f2(k)=ε(k)时yzs2(k)=?
③ 由H(z)写系统的差分方程,也可画模拟图及信号流图。
例 一LTI离散系统,已知当y(-1)=0,y(-2)=12,f(-2)=
1
2 f(k)=ε(k)时y(k)=
[1-(-1)k-(-2)k]ε(k),求该系统的差分方程。
④ 由H(z)的极点分布判断系统的稳定性
例 已知H(z)= 3z+1
z2+2z+2
,写出该系统的差分方程。
4.系统的频率响应
H(ejω)=H(z)z=ejω (DTFT)
(1)系统各队复正弦序列的稳态响应
当f(k)=ejωk时
yzs(k)=f(k)h(k)=∑h(i)ejω(k-i)
=ejωk∑
!
i=-
!
h(i)e(jω)-i=ejωkH(ejω)
H(ejω)= H(ejω)ejφ(ω)
∴yzs(k)= H(jω)ej[ωk+φ(ω)]
结论:系统对复正弦序列的稳态响应仍是同频率的离散指数复正弦序列。
(2)系统各队正弦序列的稳态响应
当f(k)=Acos(ωk+φ0)
yzs(k)=AH(ejω)cos[ωk+φ0+φ(ω)]
例1 已知y(k)+2y(k-1)+3y(k-2)=f(k-1),求频率响应。
5.系统的z域框图
时域模型 频域模型
数乘器 f(k) →
a
af(k) F(z) →
a
aF(z)
加法器
延时单元
延时单元
(零状态)
—16—
管致中《信号与线性系统》考点精讲
例1
已知f(k)=ε(k),y(-1)=0,y(-2)=12求h(k),yzs(k),yzi(k)。
例2 若f(k)=2+3cos(0.5πk+30°)+4cos(πk+60°),求系统的稳态响应y(k)。
例3 y(k)+0.2y(k-1)-0.24y(k-2)=f(k)+f(k-1)
(1)求h(k)
(2)判断系统的稳定性
(3)f(k)=12cos(2π),求稳态响应。
练习 f(k)=5+5cosπ2k,求稳态响应。
6.信号流图及系统模拟
(1)信号流图
常用术语,简化规则,梅森公式等在第五章已讲到。
梅森公式:H=1
Δ∑
n
i=1
PiΔi
例1
—26—
求H(z)
例2 已知n(k)=(0.5k-0.4k)ε(k),求该系统的信号流图。
(2)系统模拟
1°直接模拟 2°并联模拟 3°级联模拟
例1 y(k)-34y(k-1)+
1
8y(k-2)=f(k)+
1
3f(k-1)
7.离散系统的稳定性
(1)系统的因果性
时域:■ 若f(k)<0则yzs(k)=0,k<0
■h(k)=0,k<0
■(响应不出现z的正幂)
Z域:■H(z)的收敛区必在某圆外
■H(z)=
bmz
m +… +b1z+b0
anz
n+… +a1z+a0
中必须m
"
n
(2)系统的稳定性
离散系统的判稳准则:H(z)的极点全部位于单位圆内。系统稳定
朱里准则H(z)=N(z)D(z)
设特征多项式D(z)=anz
n+an-1z
n-1+… +a1z+a0
列表
行
1 an an-1 an-2 … a2 a1 a0
2 a0 a1 a2 … an-2 an-1 an
3 cn-1 cn-2 cn-3 … c1 c0
4 c0 c1 c2 … cn-2 cn-1
5 dn-2 dn-3 dn-4 … d0
6 d0 d1 d2 … dn-2
2n-3 r2 r1 r0
—36—
管致中《信号与线性系统》考点精讲
cn-1 =
an a0
a0 an
cn-2 =
an a1
a0 an-1
cn-3 =
an a2
a0 an-2
dn-2 =
cn-1 c0
c0 cn-1
dn-3 =
cn-1 c1
c0 cn-2
直到2n-3行
朱里准则:D(z)=0的所有根都在单位圆内的充要条件是
D(1)>0
(-1)nD(-1)>0
an > a0
cn-1 > c0
dn-1 > d0
r2 > r
0
各奇数行的第一个元素比大于最后一个元素的绝对值
例1 若H(z)= 5z2+3z+2
4z4-4z3+2z-1
,判断该系统是否稳定。
例2 H(z)= z2-1
z2+0.5z+(k+1)
,为使系统稳定,K应满足什么条件?
时域:∑
!
k=-
!
h(k)"
M(M为正常数)
z域:H(z)的极点必须全部在单位圆内 (朱里准则)
(单位圆上有单极点,则为边界稳定)
例 已知h(k)=2ε(k),则系统是 系统
A.因果,稳定 B.非因果,稳定
C.因果,非稳定 D.非因果,非稳定
六、s域与z域的关系
S平面与z平面的映射类系
在S平面中的极点:S=σ+jω
在z平面中的极点:z=esT =eσT·ρjωT =ρejθ
—46—
其中ρ=eσT,θ=ωT
讨论:
①σ<0:S左半平面;ρ= z<1即z平面的单位圆内
②σ>0:S右半平面;ρ= z>1即z平面的单位圆外
③σ=0:S平面虚轴;ρ= z=1即z平面的单位圆上
—56—
管致中《信号与线性系统》考点精讲
第九章 线性系统的状态变量分析
【本章知识要点】
一、状态方程和输出方程
二、状态方程的建立
三、状态方程的解
一、状态方程和输出方程
1.描述系统的两种方法:
■输入一输出描述法:
只关心输入信号与输出信号之间的关系,不涉及系统内部。
■状态变量描述法:
以系统内部某些变量作为状态变量,表达出系统的全部
状态和性能。
2.状态
表示动态系统的一组最少变量,只要知道t=t0时这组变量和
t>t0时的输入,就能完全确定系统在任何时间tt0的行为。
3.状态变量
能够表示系统状态的那些变量,iL(t),uc(t)等。
4.状态方程
体现系统的状态与输入之间关系的n元一阶
微分/差分方程组。
5.输出方程
由状态变量和激励表示的输出响应。
二、状态方程的建立
1.连续系统状态方程的建立
x
·
(t)=Ax(t)+Be(t) 状态方程
y(t)=Cx(t)+De(t) 输出方程
—66—
(1)由电路图求状态方程
■选择状态变量:uc(t),iL(t)
■对电容列KAL方程,对电感列KCL方程
■消去非状态变量
■写成标准形式
例:以x3(t)为输出,列写状态方程
(2)由信号流图或框图求状态方程
例1 H(s)=
b3s
3+b2s
2+b1s+b0
s3+a2s
2+a1s+a0
例2
(3)由微分方程求状态方程
求解思路:微分方程→H(s)→状态方程
例 y″(t)+3y′(t)+2y(t)=5e'(t)+2e(t)
2.离散系统状态方程的建立
x(k+1)=Ax(k)+Be(k) 状态方程
y(k)=Cx(k)+De(k) 输出方程
列写过程与连续系统相似
—76—
管致中《信号与线性系统》考点精讲
例1
例2
例 y(k+2)+3y(k+1)+2y(k)=e(k+1)+e(k)
三、状态方程的解
1.连续系统的拉普拉斯变换解
(1)x
·
(t)=Ax(t)+Be(t)
sX(s)-x(0)=Ax(s)+BE(s)
(sI-A)X(s)=x(0)+BE(s)
X(s)=(sI-A)-1x(0)+(sI-A)-1BE(s)
(2)y(t)=Cx(t)+De(t)
Y(s)=CX(s)+DE(s)
=C(sI-A)-1x(0)+[C(sI-A)-1B+D]E(s)
=Yzi(s)+Yzs(s)
(3)预解矩阵 Φ(s)=(sI-A)-1
状态转移矩阵φ(t)=eAtΦ(s)=(sI-A)-1
系统函数矩阵 H(s)=CΦ(s)B+D
冲激响应矩阵h(t)=Cφ(t)B+Dδ(t)
—86—
考试点(www.kaoshidian.com)名师精品课程 电话:4006885365
(4)判稳
D(s)=det(sI-A)=0的根全部位于s的左半平面,则系统稳定。
例
2.离散系统的Z变换解
(1)x(k+1)=Ax(k)+Be(k)
zx(z)-zx(0)=AX(z)+BE(z)
X(z)=(zI-A)-1zx(0)+(zI-A)-1BE(z)
(2)y(k)=Cx(k)+De(k)
Y(z)=Cx(z)+DE(z)=C(zI-A)-1zx(0)+[C(zI-A)-1B+D]E(z)
(3)预解矩 Φ(z)=(zI-A)-1z
状态转移矩阵 φ(k)=AkΦ(z)
系统函数矩阵 H(z)=CΦ(z)z-1B+D
冲激响应矩阵h(k)H(z)
(4)判稳
D(z)=det(zI-A)=0的根全部位于单位圆内,则系统稳定。
—96—
管致中《信号与线性系统》考点精讲
阵高速下载:
点击后进入安全下载页,再进行实际下载。下载链接有效期 24 小时,过期会自动刷新。
 WMS仓库系统
WMS仓库系统