概要信息:
Squeeze-and-Excitation Networks
Jie Hu∗
Momenta
hujie@momenta.ai
Li Shen∗
University of Oxford
lishen@robots.ox.ac.uk
Gang Sun∗
Momenta
sungang@momenta.ai
Abstract
Convolutional neural networks are built upon the con-
volution operation, which extracts informative features by
fusing spatial and channel-wise information together within
local receptive fields. In order to boost the representational
power of a network, much existing work has shown the
benefits of enhancing spatial encoding. In this work, we
focus on channels and propose a novel architectural unit,
which we term the “Squeeze-and-Excitation”(SE) block,
that adaptively recalibrates channel-wise feature responses
by explicitly modelling interdependencies between chan-
nels. We demonstrate that by stacking these blocks to-
gether, we can construct SENet architectures that gener-
alise extremely well across challenging datasets. Crucially,
we find that SE blocks produce significant performance im-
provements for existing state-of-the-art deep architectures
at slight computational cost. SENets formed the founda-
tion of our ILSVRC 2017 classification submission which
won first place and significantly reduced the top-5 error to
2.251%, achieving a ∼25% relative improvement over the
winning entry of 2016.
1. Introduction
Convolutional neural networks (CNNs) have proven to
be effective models for tackling a variety of visual tasks
[19, 23, 29, 41]. For each convolutional layer, a set of fil-
ters are learned to express local spatial connectivity patterns
along input channels. In other words, convolutional filters
are expected to be informative combinations by fusing spa-
tial and channel-wise information together, while restricted
in local receptive fields. By stacking a series of convo-
lutional layers interleaved with non-linearities and down-
sampling, CNNs are capable of capturing hierarchical pat-
terns with global receptive fields as powerful image descrip-
tions. Recent work has demonstrated the performance of
networks can be improved by explicitly embedding learning
mechanisms that help capture spatial correlations without
∗Equal contribution.
requiring additional supervision. One such approach was
popularised by the Inception architectures [14, 39], which
showed that the network can achieve competitive accuracy
by embedding multi-scale processes in its modules. More
recent work has sought to better model spatial dependence
[1, 27] and incorporate spatial attention [17].
In contrast to these methods, we investigate a different
aspect of architectural design - the channel relationship, by
introducing a new architectural unit, which we term the
“Squeeze-and-Excitation” (SE) block. Our goal is to im-
prove the representational power of a network by explicitly
modelling the interdependencies between the channels of its
convolutional features. To achieve this, we propose a mech-
anism that allows the network to perform feature recalibra-
tion, through which it can learn to use global information
to selectively emphasise informative features and suppress
less useful ones.
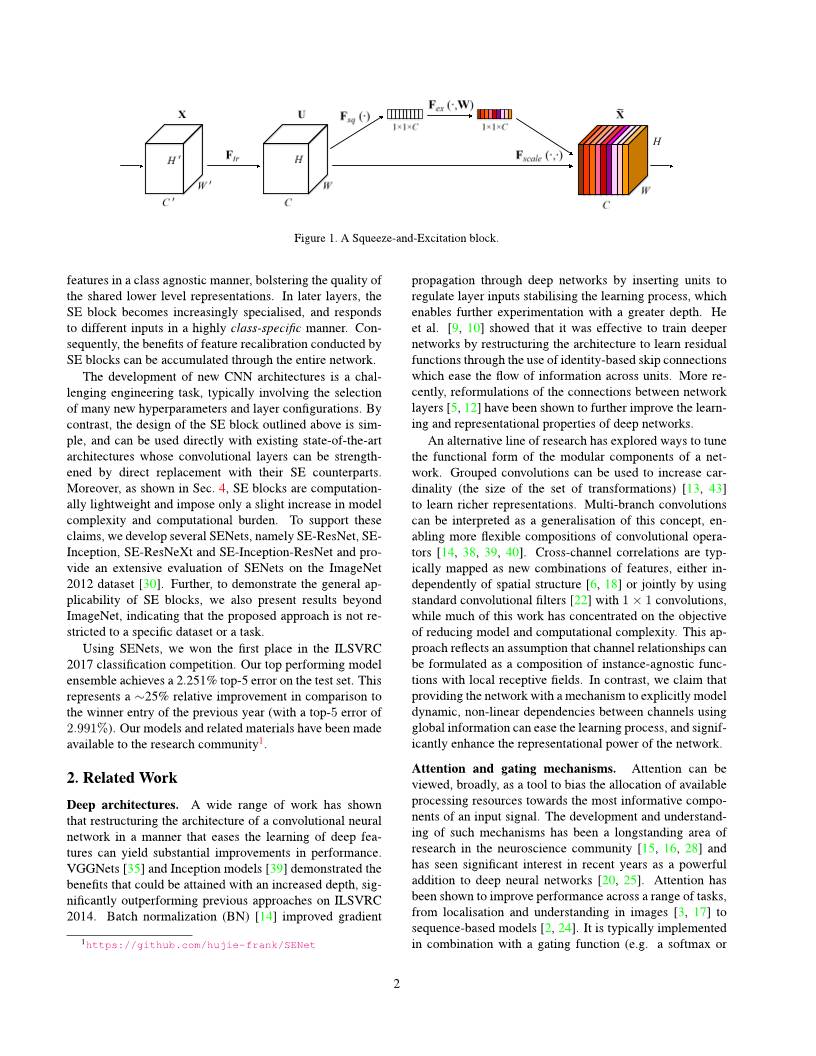
The basic structure of the SE building block is illustrated
in Fig. 1. For any given transformation Ftr : X → U,
X ∈ RW ′×H′×C′
,U ∈ RW×H×C , (e.g. a convolution
or a set of convolutions), we can construct a correspond-
ing SE block to perform feature recalibration as follows.
The features U are first passed through a squeeze opera-
tion, which aggregates the feature maps across spatial di-
mensions W × H to produce a channel descriptor. This
descriptor embeds the global distribution of channel-wise
feature responses, enabling information from the global re-
ceptive field of the network to be leveraged by its lower lay-
ers. This is followed by an excitation operation, in which
sample-specific activations, learned for each channel by a
self-gating mechanism based on channel dependence, gov-
ern the excitation of each channel. The feature maps U
are then reweighted to generate the output of the SE block
which can then be fed directly into subsequent layers.
An SE network can be generated by simply stacking a
collection of SE building blocks. SE blocks can also be
used as a drop-in replacement for the original block at any
depth in the architecture. However, while the template for
the building block is generic, as we show in Sec. 6.3, the
role it performs at different depths adapts to the needs of the
network. In the early layers, it learns to excite informative
1
ar
X
iv
:1
70
9.
01
50
7v
1
[
cs
.C
V
]
5
S
ep
2
01
7
Figure 1. A Squeeze-and-Excitation block.
features in a class agnostic manner, bolstering the quality of
the shared lower level representations. In later layers, the
SE block becomes increasingly specialised, and responds
to different inputs in a highly class-specific manner. Con-
sequently, the benefits of feature recalibration conducted by
SE blocks can be accumulated through the entire network.
The development of new CNN architectures is a chal-
lenging engineering task, typically involving the selection
of many new hyperparameters and layer configurations. By
contrast, the design of the SE block outlined above is sim-
ple, and can be used directly with existing state-of-the-art
architectures whose convolutional layers can be strength-
ened by direct replacement with their SE counterparts.
Moreover, as shown in Sec. 4, SE blocks are computation-
ally lightweight and impose only a slight increase in model
complexity and computational burden. To support these
claims, we develop several SENets, namely SE-ResNet, SE-
Inception, SE-ResNeXt and SE-Inception-ResNet and pro-
vide an extensive evaluation of SENets on the ImageNet
2012 dataset [30]. Further, to demonstrate the general ap-
plicability of SE blocks, we also present results beyond
ImageNet, indicating that the proposed approach is not re-
stricted to a specific dataset or a task.
Using SENets, we won the first place in the ILSVRC
2017 classification competition. Our top performing model
ensemble achieves a 2.251% top-5 error on the test set. This
represents a ∼25% relative improvement in comparison to
the winner entry of the previous year (with a top-5 error of
2.991%). Our models and related materials have been made
available to the research community1.
2. Related Work
Deep architectures. A wide range of work has shown
that restructuring the architecture of a convolutional neural
network in a manner that eases the learning of deep fea-
tures can yield substantial improvements in performance.
VGGNets [35] and Inception models [39] demonstrated the
benefits that could be attained with an increased depth, sig-
nificantly outperforming previous approaches on ILSVRC
2014. Batch normalization (BN) [14] improved gradient
1https://github.com/hujie-frank/SENet
propagation through deep networks by inserting units to
regulate layer inputs stabilising the learning process, which
enables further experimentation with a greater depth. He
et al. [9, 10] showed that it was effective to train deeper
networks by restructuring the architecture to learn residual
functions through the use of identity-based skip connections
which ease the flow of information across units. More re-
cently, reformulations of the connections between network
layers [5, 12] have been shown to further improve the learn-
ing and representational properties of deep networks.
An alternative line of research has explored ways to tune
the functional form of the modular components of a net-
work. Grouped convolutions can be used to increase car-
dinality (the size of the set of transformations) [13, 43]
to learn richer representations. Multi-branch convolutions
can be interpreted as a generalisation of this concept, en-
abling more flexible compositions of convolutional opera-
tors [14, 38, 39, 40]. Cross-channel correlations are typ-
ically mapped as new combinations of features, either in-
dependently of spatial structure [6, 18] or jointly by using
standard convolutional filters [22] with 1× 1 convolutions,
while much of this work has concentrated on the objective
of reducing model and computational complexity. This ap-
proach reflects an assumption that channel relationships can
be formulated as a composition of instance-agnostic func-
tions with local receptive fields. In contrast, we claim that
providing the network with a mechanism to explicitly model
dynamic, non-linear dependencies between channels using
global information can ease the learning process, and signif-
icantly enhance the representational power of the network.
Attention and gating mechanisms. Attention can be
viewed, broadly, as a tool to bias the allocation of available
processing resources towards the most informative compo-
nents of an input signal. The development and understand-
ing of such mechanisms has been a longstanding area of
research in the neuroscience community [15, 16, 28] and
has seen significant interest in recent years as a powerful
addition to deep neural networks [20, 25]. Attention has
been shown to improve performance across a range of tasks,
from localisation and understanding in images [3, 17] to
sequence-based models [2, 24]. It is typically implemented
in combination with a gating function (e.g. a softmax or
2
sigmoid) and sequential techniques [11, 37]. Recent work
has shown its applicability to tasks such as image captioning
[4, 44] and lip reading [7], in which it is exploited to effi-
ciently aggregate multi-modal data. In these applications,
it is typically used on top of one or more layers represent-
ing higher-level abstractions for adaptation between modal-
ities. Highway networks [36] employ a gating mechanism
to regulate the shortcut connection, enabling the learning
of very deep architectures. Wang et al. [42] introduce
a powerful trunk-and-mask attention mechanism using an
hourglass module [27], inspired by its success in semantic
segmentation. This high capacity unit is inserted into deep
residual networks between intermediate stages. In contrast,
our proposed SE-block is a lightweight gating mechanism,
specialised to model channel-wise relationships in a com-
putationally efficient manner and designed to enhance the
representational power of modules throughout the network.
3. Squeeze-and-Excitation Blocks
The Squeeze-and-Excitation block is a computational
unit which can be constructed for any given transforma-
tion Ftr : X → U, X ∈ RW ′×H′×C′
,U ∈ RW×H×C .
For simplicity of exposition, in the notation that follows
we take Ftr to be a standard convolutional operator. Let
V = [v1,v2, . . . ,vC ] denote the learned set of filter ker-
nels, where vc refers to the parameters of the c-th filter. We
can then write the outputs of Ftr as U = [u1,u2, . . . ,uC ]
where
uc = vc ∗X =
C′∑
s=1
vs
c ∗ xs. (1)
Here ∗ denotes convolution, vc = [v1
c ,v
2
c , . . . ,v
C′
c ] and
X = [x1,x2, . . . ,xC′
] (to simplify the notation, bias terms
are omitted). Here vs
c is a 2D spatial kernel, and therefore
represents a single channel of vc which acts on the corre-
sponding channel of X. Since the output is produced by
a summation through all channels, the channel dependen-
cies are implicitly embedded in vc, but these dependencies
are entangled with the spatial correlation captured by the
filters. Our goal is to ensure that the network is able to in-
crease its sensitivity to informative features so that they can
be exploited by subsequent transformations, and to suppress
less useful ones. We propose to achieve this by explicitly
modelling channel interdependencies to recalibrate filter re-
sponses in two steps, squeeze and excitation, before they are
fed into next transformation. A diagram of an SE building
block is shown in Fig. 1.
3.1. Squeeze: Global Information Embedding
In order to tackle the issue of exploiting channel depen-
dencies, we first consider the signal to each channel in the
output features. Each of the learned filters operate with a
local receptive field and consequently each unit of the trans-
formation output U is unable to exploit contextual informa-
tion outside of this region. This is an issue that becomes
more severe in the lower layers of the network whose re-
ceptive field sizes are small.
To mitigate this problem, we propose to squeeze global
spatial information into a channel descriptor. This is
achieved by using global average pooling to generate
channel-wise statistics. Formally, a statistic z ∈ RC is gen-
erated by shrinking U through spatial dimensions W ×H ,
where the c-th element of z is calculated by:
zc = Fsq(uc) =
1
W ×H
W∑
i=1
H∑
j=1
uc(i, j). (2)
Discussion. The transformation output U can be in-
terpreted as a collection of the local descriptors whose
statistics are expressive for the whole image. Exploiting
such information is prevalent in feature engineering work
[31, 34, 45]. We opt for the simplest, global average pool-
ing, while more sophisticated aggregation strategies could
be employed here as well.
3.2. Excitation: Adaptive Recalibration
To make use of the information aggregated in the squeeze
operation, we follow it with a second operation which aims
to fully capture channel-wise dependencies. To fulfil this
objective, the function must meet two criteria: first, it must
be flexible (in particular, it must be capable of learning
a nonlinear interaction between channels) and second, it
must learn a non-mutually-exclusive relationship as multi-
ple channels are allowed to be emphasised opposed to one-
hot activation. To meet these criteria, we opt to employ a
simple gating mechanism with a sigmoid activation:
s = Fex(z,W) = σ(g(z,W)) = σ(W2δ(W1z)), (3)
where δ refers to the ReLU [26] function, W1 ∈ RC
r ×C and
W2 ∈ RC×C
r . To limit model complexity and aid general-
isation, we parameterise the gating mechanism by forming
a bottleneck with two fully-connected (FC) layers around
the non-linearity, i.e. a dimensionality-reduction layer with
parameters W1 with reduction ratio r (we set it to be 16,
and this parameter choice is discussed in Sec. 6.3), a ReLU
and then a dimensionality-increasing layer with parameters
W2. The final output of the block is obtained by rescaling
the transformation output U with the activations:
x̃c = Fscale(uc, sc) = sc · uc, (4)
where X̃ = [x̃1, x̃2, . . . , x̃C ] and Fscale(uc, sc) refers to
channel-wise multiplication between the feature map uc ∈
RW×H and the scalar sc.
3
Inception
Global pooling
FC
SE-Inception Module
FC
1×1×C
1×1×C#
X
Inception
X$
Inception Module
X
X$
Sigmoid
1×1×C
1×1×C
Scale
W ×&×C
W ×&×C
ReLU
1×1×C#
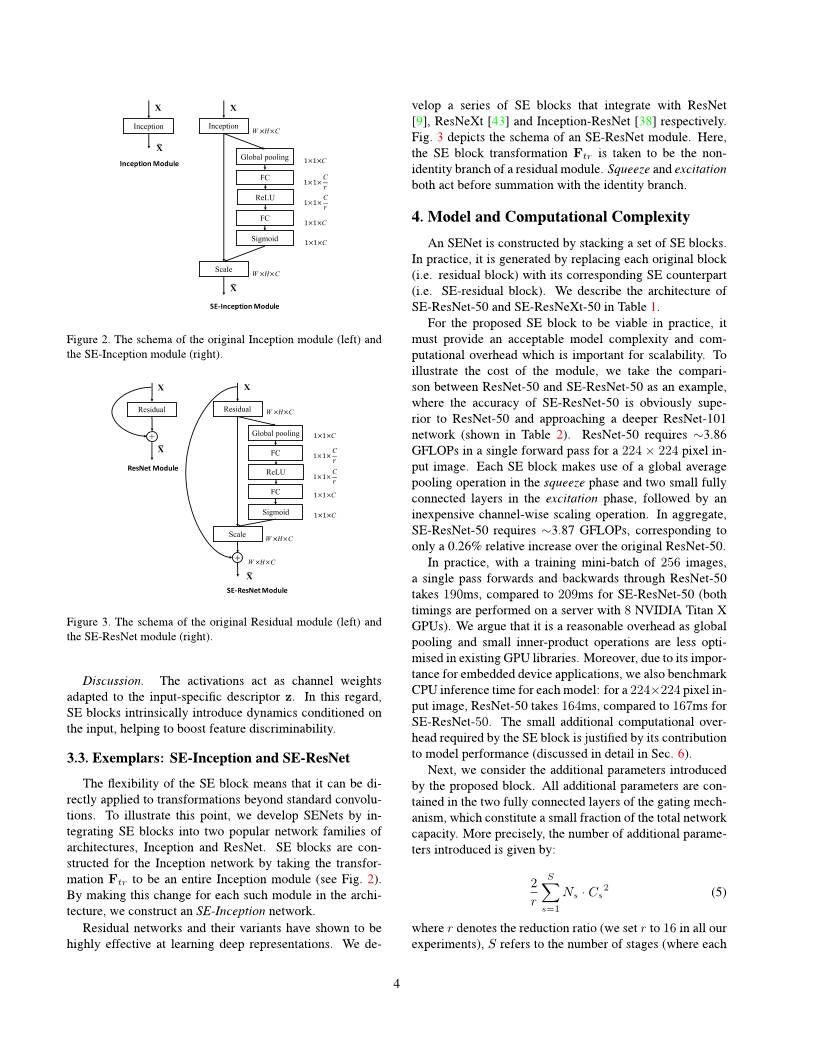
Figure 2. The schema of the original Inception module (left) and
the SE-Inception module (right).
SE-ResNetModule
+
Global pooling
FC
FC
+
ResNet Module
X
X$
X
X$
Sigmoid
1×1×C
1×1×C#
1×1×C
1×1×C
Scale
W ×&×C
W ×&×C
W ×&×C
Residual Residual
ReLU 1×1×C#
Figure 3. The schema of the original Residual module (left) and
the SE-ResNet module (right).
Discussion. The activations act as channel weights
adapted to the input-specific descriptor z. In this regard,
SE blocks intrinsically introduce dynamics conditioned on
the input, helping to boost feature discriminability.
3.3. Exemplars: SE-Inception and SE-ResNet
The flexibility of the SE block means that it can be di-
rectly applied to transformations beyond standard convolu-
tions. To illustrate this point, we develop SENets by in-
tegrating SE blocks into two popular network families of
architectures, Inception and ResNet. SE blocks are con-
structed for the Inception network by taking the transfor-
mation Ftr to be an entire Inception module (see Fig. 2).
By making this change for each such module in the archi-
tecture, we construct an SE-Inception network.
Residual networks and their variants have shown to be
highly effective at learning deep representations. We de-
velop a series of SE blocks that integrate with ResNet
[9], ResNeXt [43] and Inception-ResNet [38] respectively.
Fig. 3 depicts the schema of an SE-ResNet module. Here,
the SE block transformation Ftr is taken to be the non-
identity branch of a residual module. Squeeze and excitation
both act before summation with the identity branch.
4. Model and Computational Complexity
An SENet is constructed by stacking a set of SE blocks.
In practice, it is generated by replacing each original block
(i.e. residual block) with its corresponding SE counterpart
(i.e. SE-residual block). We describe the architecture of
SE-ResNet-50 and SE-ResNeXt-50 in Table 1.
For the proposed SE block to be viable in practice, it
must provide an acceptable model complexity and com-
putational overhead which is important for scalability. To
illustrate the cost of the module, we take the compari-
son between ResNet-50 and SE-ResNet-50 as an example,
where the accuracy of SE-ResNet-50 is obviously supe-
rior to ResNet-50 and approaching a deeper ResNet-101
network (shown in Table 2). ResNet-50 requires ∼3.86
GFLOPs in a single forward pass for a 224 × 224 pixel in-
put image. Each SE block makes use of a global average
pooling operation in the squeeze phase and two small fully
connected layers in the excitation phase, followed by an
inexpensive channel-wise scaling operation. In aggregate,
SE-ResNet-50 requires ∼3.87 GFLOPs, corresponding to
only a 0.26% relative increase over the original ResNet-50.
In practice, with a training mini-batch of 256 images,
a single pass forwards and backwards through ResNet-50
takes 190ms, compared to 209ms for SE-ResNet-50 (both
timings are performed on a server with 8 NVIDIA Titan X
GPUs). We argue that it is a reasonable overhead as global
pooling and small inner-product operations are less opti-
mised in existing GPU libraries. Moreover, due to its impor-
tance for embedded device applications, we also benchmark
CPU inference time for each model: for a 224×224 pixel in-
put image, ResNet-50 takes 164ms, compared to 167ms for
SE-ResNet-50. The small additional computational over-
head required by the SE block is justified by its contribution
to model performance (discussed in detail in Sec. 6).
Next, we consider the additional parameters introduced
by the proposed block. All additional parameters are con-
tained in the two fully connected layers of the gating mech-
anism, which constitute a small fraction of the total network
capacity. More precisely, the number of additional parame-
ters introduced is given by:
2
r
S∑
s=1
Ns · Cs
2 (5)
where r denotes the reduction ratio (we set r to 16 in all our
experiments), S refers to the number of stages (where each
4
Output size ResNet-50 SE-ResNet-50 SE-ResNeXt-50 (32×4d)
112×112 conv, 7×7, 64, stride 2
56×56
max pool, 3×3, stride 2 conv, 1× 1, 64
conv, 3× 3, 64
conv, 1× 1, 256
× 3
conv, 1× 1, 64
conv, 3× 3, 64
conv, 1× 1, 256
fc, [16, 256]
× 3
conv, 1× 1, 128
conv, 3× 3, 128 C = 32
conv, 1× 1, 256
fc, [16, 256]
× 3
28×28
conv, 1× 1, 128
conv, 3× 3, 128
conv, 1× 1, 512
× 4
conv, 1× 1, 128
conv, 3× 3, 128
conv, 1× 1, 512
fc, [32, 512]
× 4
conv, 1× 1, 256
conv, 3× 3, 256 C = 32
conv, 1× 1, 512
fc, [32, 512]
× 4
14×14
conv, 1× 1, 256
conv, 3× 3, 256
conv, 1× 1, 1024
× 6
conv, 1× 1, 256
conv, 3× 3, 256
conv, 1× 1, 1024
fc, [64, 1024]
× 6
conv, 1× 1, 512
conv, 3× 3, 512 C = 32
conv, 1× 1, 1024
fc, [64, 1024]
× 6
7×7
conv, 1× 1, 512
conv, 3× 3, 512
conv, 1× 1, 2048
× 3
conv, 1× 1, 512
conv, 3× 3, 512
conv, 1× 1, 2048
fc, [128, 2048]
× 3
conv, 1× 1, 1024
conv, 3× 3, 1024 C = 32
conv, 1× 1, 2048
fc, [128, 2048]
× 3
1×1 global average pool, 1000-d fc, softmax
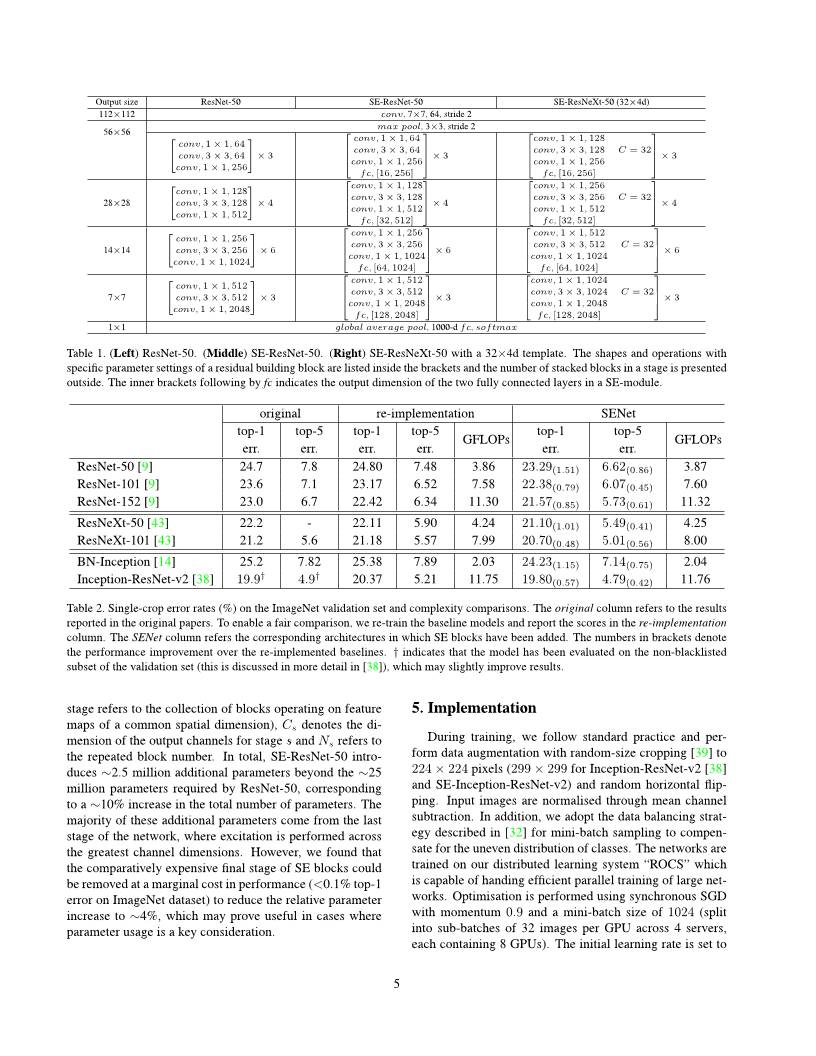
Table 1. (Left) ResNet-50. (Middle) SE-ResNet-50. (Right) SE-ResNeXt-50 with a 32×4d template. The shapes and operations with
specific parameter settings of a residual building block are listed inside the brackets and the number of stacked blocks in a stage is presented
outside. The inner brackets following by fc indicates the output dimension of the two fully connected layers in a SE-module.
original re-implementation SENet
top-1
err.
top-5
err.
top-1
err.
top-5
err.
GFLOPs
top-1
err.
top-5
err.
GFLOPs
ResNet-50 [9] 24.7 7.8 24.80 7.48 3.86 23.29(1.51) 6.62(0.86) 3.87
ResNet-101 [9] 23.6 7.1 23.17 6.52 7.58 22.38(0.79) 6.07(0.45) 7.60
ResNet-152 [9] 23.0 6.7 22.42 6.34 11.30 21.57(0.85) 5.73(0.61) 11.32
ResNeXt-50 [43] 22.2 - 22.11 5.90 4.24 21.10(1.01) 5.49(0.41) 4.25
ResNeXt-101 [43] 21.2 5.6 21.18 5.57 7.99 20.70(0.48) 5.01(0.56) 8.00
BN-Inception [14] 25.2 7.82 25.38 7.89 2.03 24.23(1.15) 7.14(0.75) 2.04
Inception-ResNet-v2 [38] 19.9† 4.9† 20.37 5.21 11.75 19.80(0.57) 4.79(0.42) 11.76
Table 2. Single-crop error rates (%) on the ImageNet validation set and complexity comparisons. The original column refers to the results
reported in the original papers. To enable a fair comparison, we re-train the baseline models and report the scores in the re-implementation
column. The SENet column refers the corresponding architectures in which SE blocks have been added. The numbers in brackets denote
the performance improvement over the re-implemented baselines. † indicates that the model has been evaluated on the non-blacklisted
subset of the validation set (this is discussed in more detail in [38]), which may slightly improve results.
stage refers to the collection of blocks operating on feature
maps of a common spatial dimension), Cs denotes the di-
mension of the output channels for stage s and Ns refers to
the repeated block number. In total, SE-ResNet-50 intro-
duces ∼2.5 million additional parameters beyond the ∼25
million parameters required by ResNet-50, corresponding
to a ∼10% increase in the total number of parameters. The
majority of these additional parameters come from the last
stage of the network, where excitation is performed across
the greatest channel dimensions. However, we found that
the comparatively expensive final stage of SE blocks could
be removed at a marginal cost in performance (<0.1% top-1
error on ImageNet dataset) to reduce the relative parameter
increase to ∼4%, which may prove useful in cases where
parameter usage is a key consideration.
5. Implementation
During training, we follow standard practice and per-
form data augmentation with random-size cropping [39] to
224× 224 pixels (299× 299 for Inception-ResNet-v2 [38]
and SE-Inception-ResNet-v2) and random horizontal flip-
ping. Input images are normalised through mean channel
subtraction. In addition, we adopt the data balancing strat-
egy described in [32] for mini-batch sampling to compen-
sate for the uneven distribution of classes. The networks are
trained on our distributed learning system “ROCS” which
is capable of handing efficient parallel training of large net-
works. Optimisation is performed using synchronous SGD
with momentum 0.9 and a mini-batch size of 1024 (split
into sub-batches of 32 images per GPU across 4 servers,
each containing 8 GPUs). The initial learning rate is set to
5
0 20 40 60 80 100
epochs
15
20
25
30
35
40
45
50
55
60
To
p-
1
er
ro
r (
%
)
ResNet-50 train
ResNet-50 val
SE-ResNet-50 train
SE-ResNet-50 val
0 20 40 60 80 100
epochs
15
20
25
30
35
40
45
50
55
60
To
p-
1
er
ro
r (
%
)
ResNet-152 train
ResNet-152 val
SE-ResNet-152 train
SE-ResNet-152 val
Figure 4. Training curves on ImageNet. (Left): ResNet-50 and SE-ResNet-50; (Right): ResNet-152 and SE-ResNet-152.
0 20 40 60 80 100
epochs
15
20
25
30
35
40
45
50
55
60
To
p-
1
er
ro
r (
%
)
ResNeXt-50 train
ResNeXt-50 val
SE-ResNeXt-50 train
SE-ResNeXt-50 val
0 20 40 60 80 100
epochs
15
20
25
30
35
40
45
50
55
60
To
p-
1
er
ro
r (
%
)
Inception-ResNet-v2 train
Inception-ResNet-v2 val
SE-Inception-ResNet-v2 train
SE-Inception-ResNet-v2 val
Figure 5. Training curves on ImageNet. (Left): ResNeXt-50 and SE-ResNeXt-50; (Right): Inception-ResNet-v2 and SE-Inception-
ResNet-v2.
0.6 and decreased by a factor of 10 every 30 epochs. All
models are trained for 100 epochs from scratch, using the
weight initialisation strategy described in [8].
6. Experiments
In this section we conduct extensive experiments on the
ImageNet 2012 dataset [30] for the purposes: first, to ex-
plore the impact of the proposed SE block for the basic
networks with different depths and second, to investigate
its capacity of integrating with current state-of-the-art net-
work architectures, which aim to a fair comparison be-
tween SENets and non-SENets rather than pushing the per-
formance. Next, we present the results and details of the
models for ILSVRC 2017 classification task. Furthermore,
we perform experiments on the Places365-Challenge scene
classification dataset [48] to investigate how well SENets
are able to generalise to other datasets. Finally, we investi-
gate the role of excitation and give some analysis based on
experimental phenomena.
6.1. ImageNet Classification
The ImageNet 2012 dataset is comprised of 1.28 mil-
lion training images and 50K validation images from 1000
classes. We train networks on the training set and report
the top-1 and the top-5 errors using centre crop evaluations
on the validation set, where 224 × 224 pixels are cropped
from each image whose shorter edge is first resized to 256
(299 × 299 from each image whose shorter edge is first
resized to 352 for Inception-ResNet-v2 and SE-Inception-
ResNet-v2).
Network depth. We first compare the SE-ResNet against
a collection of standard ResNet architectures. Each ResNet
and its corresponding SE-ResNet are trained with identi-
cal optimisation schemes. The performance of the differ-
ent networks on the validation set is shown in Table 2,
which shows that SE blocks consistently improve perfor-
mance across different depths with an extremely small in-
crease in computational complexity.
6
0 20 40 60 80 100
epochs
20
30
40
50
60
70
80
To
p-
1
er
ro
r (
%
)
BN-Inception train
BN-Inception val
SE-BN-Inception train
SE-BN-Inception val
Figure 6. Training curves of BN-Inception and SE-BN-Inception
on ImageNet.
Remarkably, SE-ResNet-50 achieves a single-crop top-5
validation error of 6.62%, exceeding ResNet-50 (7.48%)
by 0.86% and approaching the performance achieved by
the much deeper ResNet-101 network (6.52% top-5 error)
with only half of the computational overhead (3.87 GFLOPs
vs. 7.58 GFLOPs). This pattern is repeated at greater
depth, where SE-ResNet-101 (6.07% top-5 error) not only
matches, but outperforms the deeper ResNet-152 network
(6.34% top-5 error) by 0.27%. Fig. 4 depicts the train-
ing and validation curves of SE-ResNets and ResNets, re-
spectively. While it should be noted that the SE blocks
themselves add depth, they do so in an extremely compu-
tationally efficient manner and yield good returns even at
the point at which extending the depth of the base archi-
tecture achieves diminishing returns. Moreover, we see that
the performance improvements are consistent through train-
ing across a range of different depths, suggesting that the
improvements induced by SE blocks can be used in combi-
nation with adding more depth to the base architecture.
Integration with modern architectures. We next inves-
tigate the effect of combining SE blocks with another two
state-of-the-art architectures, Inception-ResNet-v2 [38] and
ResNeXt [43]. The Inception architecture constructs mod-
ules of convolutions as multibranch combinations of fac-
torised filters, reflecting the Inception hypothesis [6] that
spatial correlations and cross-channel correlations can be
mapped independently. In contrast, the ResNeXt archi-
tecture asserts that richer representations can be obtained
by aggregating combinations of sparsely connected (in
the channel dimension) convolutional features. Both ap-
proaches introduce prior-structured correlations in modules.
We construct SENet equivalents of these networks, SE-
Inception-ResNet-v2 and SE-ResNeXt (the configuration of
SE-ResNeXt-50 (32×4d) is given in Table 1). Like previ-
ous experiments, the same optimisation scheme is used for
both the original networks and their SENet counterparts.
The results given in Table 2 illustrate the significant per-
formance improvement induced by SE blocks when intro-
duced into both architectures. In particular, SE-ResNeXt-50
has a top-5 error of 5.49% which is superior to both
its direct counterpart ResNeXt-50 (5.90% top-5 error) as
well as the deeper ResNeXt-101 (5.57% top-5 error), a
model which has almost double the number of parame-
ters and computational overhead. As for the experiments
of Inception-ResNet-v2, we conjecture the difference of
cropping strategy might lead to the gap between their re-
ported result and our re-implemented one, as their orig-
inal image size has not been clarified in [38] while we
crop the 299 × 299 region from a relative larger image
(where the shorter edge is resized to 352). SE-Inception-
ResNet-v2 (4.79% top-5 error) outperforms our reimple-
mented Inception-ResNet-v2 (5.21% top-5 error) by 0.42%
(a relative improvement of 8.1%) as well as the reported
result in [38]. The optimisation curves for each network
are depicted in Fig. 5, illustrating the consistency of the
improvement yielded by SE blocks throughout the training
process.
Finally, we assess the effect of SE blocks when operating
on a non-residual network by conducting experiments with
the BN-Inception architecture [14] which provides good
performance at a lower model complexity. The results of
the comparison are shown in Table 2 and the training curves
are shown in Fig. 6, exhibiting the same phenomena that
emerged in the residual architectures. In particular, SE-BN-
Inception achieves a lower top-5 error of 7.14% in com-
parison to BN-Inception whose error rate is 7.89%. These
experiments demonstrate that improvements induced by SE
blocks can be used in combination with a wide range of ar-
chitectures. Moreover, this result holds for both residual
and non-residual foundations.
Results on ILSVRC 2017 Classification Competition.
ILSVRC [30] is an annual computer vision competition
which has proved to be a fertile ground for model devel-
opments in image classification. The training and validation
data of the ILSVRC 2017 classification task are drawn from
the ImageNet 2012 dataset, while the test set consists of an
additional unlabelled 100K images. For the purposes of the
competition, the top-5 error metric is used to rank entries.
SENets formed the foundation of our submission to the
challenge where we won first place. Our winning entry
comprised a small ensemble of SENets that employed a
standard multi-scale and multi-crop fusion strategy to ob-
tain a 2.251% top-5 error on the test set. This result repre-
sents a∼25% relative improvement on the winning entry of
2016 (2.99% top-5 error). One of our high-performing net-
works is constructed by integrating SE blocks with a modi-
fied ResNeXt [43] (details of the modifications are provided
in Appendix A). We compare the proposed architecture with
7
224× 224 320× 320 / 299× 299
top-1 err. top-5 err. top-1 err. top-5 err.
ResNet-152 [9] 23.0 6.7 21.3 5.5
ResNet-200 [10] 21.7 5.8 20.1 4.8
Inception-v3 [40] - - 21.2 5.6
Inception-v4 [38] - - 20.0 5.0
Inception-ResNet-v2 [38] - - 19.9 4.9
ResNeXt-101 (64 × 4d) [43] 20.4 5.3 19.1 4.4
DenseNet-161 (k = 48) [12] 22.2 - - -
Very Deep PolyNet [47] - - 18.71 4.25
DPN-131 [5] 19.93 5.12 18.55 4.16
SENet 18.68 4.47 17.28 3.79
Table 3. Single-crop error rates of state-of-the-art CNNs on ImageNet validation set. The size of test crop is 224 × 224 and 320 × 320 /
299× 299 as in [10]. Our proposed model, SENet, shows a significant performance improvement on prior work.
top-1 err. top-5 err.
Places-365-CNN [33] 41.07 11.48
ResNet-152 (ours) 41.15 11.61
SE-ResNet-152 40.37 11.01
Table 4. Single-crop error rates (%) on the Places365 validation
set.
Ratio r top-1 err. top-5 err. model size (MB)
4 23.21 6.63 137
8 23.19 6.64 117
16 23.29 6.62 108
32 23.40 6.77 103
original 24.80 7.48 98
Table 5. Single-crop error rates (%) on the ImageNet validation set
and corresponding model sizes for the SE-ResNet-50 architecture
at different reduction ratios r. Here original refers to ResNet-50.
the state-of-the-art models on the ImageNet validation set in
Table 3. Our model achieves a top-1 error of 18.68% and a
top-5 error of 4.47% using a 224× 224 centre crop evalua-
tion on each image (where the shorter edge is first resized to
256). To enable a fair comparison with previous models, we
also provide a 320 × 320 centre crop evaluation, obtaining
the lowest error rate under both the top-1 (17.28%) and the
top-5 (3.79%) error metrics.
6.2. Scene Classification
Large portions of the ImageNet dataset consist of im-
ages dominated by single objects. To evaluate our proposed
model in more diverse scenarios, we also evaluate it on
the Places365-Challenge dataset [48] for scene classifica-
tion. This dataset comprises 8 million training images and
36, 500 validation images across 365 categories. Relative to
classification, the task of scene understanding can provide
a better assessment of the ability of a model to generalise
well and handle abstraction, since it requires the capture of
more complex data associations and robustness to a greater
level of appearance variation.
We use ResNet-152 as a strong baseline to assess the ef-
fectiveness of SE blocks and follow the evaluation protocol
in [33]. Table 4 shows the results of training a ResNet-152
model and a SE-ResNet-152 for the given task. Specifically,
SE-ResNet-152 (11.01% top-5 error) achieves a lower vali-
dation error than ResNet-152 (11.61% top-5 error), provid-
ing evidence that SE blocks can perform well on different
datasets. This SENet surpasses the previous state-of-the-
art model Places-365-CNN [33] which has a top-5 error of
11.48% on this task.
6.3. Analysis and Discussion
Reduction ratio. The reduction ratio r introduced in
Eqn. (5) is an important hyperparameter which allows us to
vary the capacity and computational cost of the SE blocks
in the model. To investigate this relationship, we conduct
experiments based on the SE-ResNet-50 architecture for a
range of different r values. The comparison in Table 5
reveals that performance does not improve monotonically
with increased capacity. This is likely to be a result of en-
abling the SE block to overfit the channel interdependen-
cies of the training set. In particular, we found that set-
ting r = 16 achieved a good tradeoff between accuracy and
complexity and consequently, we used this value for all ex-
periments.
The role of Excitation. While SE blocks have been empir-
ically shown to improve network performance, we would
8
(a) goldfish (b) pug (c) plane (d) cliff
Figure 7. Example images from the four classes of ImageNet.
also like to understand how the self-gating excitation mech-
anism operates in practice. To provide a clearer picture of
the behaviour of SE blocks, in this section we study exam-
ple activations from the SE-ResNet-50 model and examine
their distribution with respect to different classes at different
blocks. Specifically, we sample four classes from the Ima-
geNet dataset that exhibit semantic and appearance diver-
sity, namely goldfish, pug, plane and cliff (example images
from these classes are shown in Fig. 7). We then draw fifty
samples for each class from the validation set and compute
the average activations for fifty uniformly sampled chan-
nels in the last SE block in each stage (immediately prior to
downsampling) and plot their distribution in Fig. 8. For ref-
erence, we also plot the distribution of average activations
across all 1000 classes.
We make the following three observations about the role
of Excitation in SENets. First, the distribution across differ-
ent classes is nearly identical in lower layers, e.g. SE 2 3.
This suggests that the importance of feature channels is
likely to be shared by different classes in the early stages of
the network. Interestingly however, the second observation
is that at greater depth, the value of each channel becomes
much more class-specific as different classes exhibit differ-
ent preferences to the discriminative value of features e.g.
SE 4 6 and SE 5 1. The two observations are consistent
with findings in previous work [21, 46], namely that lower
layer features are typically more general (i.e. class agnostic
in the context of classification) while higher layer features
have greater specificity. As a result, representation learn-
ing benefits from the recalibration induced by SE blocks
which adaptively facilitates feature extraction and speciali-
sation to the extent that it is needed. Finally, we observe a
somewhat different phenomena in the last stage of the net-
work. SE 5 2 exhibits an interesting tendency towards a
saturated state in which most of the activations are close to
1 and the remainder are close to 0. At the point at which
all activations take the value 1, this block would become a
standard residual block. At the end of the network in the
SE 5 3 (which is immediately followed by global pooling
prior before classifiers), a similar pattern emerges over dif-
ferent classes, up to a slight change in scale (which could
be tuned by the classifiers). This suggests that SE 5 2 and
SE 5 3 are less important than previous blocks in provid-
ing recalibration to the network. This finding is consistent
with the result of the empirical investigation in Sec. 4 which
demonstrated that the overall parameter count could be sig-
nificantly reduced by removing the SE blocks for the last
stage with only a marginal loss of performance (< 0.1%
top-1 error).
7. Conclusion
In this paper we proposed the SE block, a novel architec-
tural unit designed to improve the representational capacity
of a network by enabling it to perform dynamic channel-
wise feature recalibration. Extensive experiments demon-
strate the effectiveness of SENets which achieve state-of-
the-art performance on multiple datasets. In addition, they
provide some insight into the limitations of previous archi-
tectures in modelling channel-wise feature dependencies,
which we hope may prove useful for other tasks requiring
strong discriminative features. Finally, the feature impor-
tance induced by SE blocks may be helpful to related fields
such as network pruning for compression.
Acknowledgements. We would like to thank Professor
Andrew Zisserman for his helpful comments and Samuel
Albanie for his discussions and writing edit for the paper.
We would like to thank Chao Li for his contributions in
the memory optimisation of the training system. Li Shen
is supported by the Office of the Director of National Intel-
ligence (ODNI), Intelligence Advanced Research Projects
Activity (IARPA), via contract number 2014-14071600010.
The views and conclusions contained herein are those of
the author and should not be interpreted as necessarily rep-
resenting the official policies or endorsements, either ex-
pressed or implied, of ODNI, IARPA, or the U.S. Govern-
ment. The U.S. Government is authorized to reproduce and
distribute reprints for Governmental purpose notwithstand-
ing any copyright annotation thereon.
References
[1] S. Bell, C. L. Zitnick, K. Bala, and R. Girshick. Inside-
outside net: Detecting objects in context with skip pooling
and recurrent neural networks. In CVPR, 2016.
[2] T. Bluche. Joint line segmentation and transcription for end-
to-end handwritten paragraph recognition. In NIPS, 2016.
[3] C. Cao, X. Liu, Y. Yang, Y. Yu, J. Wang, Z. Wang, Y. Huang,
L. Wang, C. Huang, W. Xu, D. Ramanan, and T. S. Huang.
Look and think twice: Capturing top-down visual atten-
tion with feedback convolutional neural networks. In ICCV,
2015.
[4] L. Chen, H. Zhang, J. Xiao, L. Nie, J. Shao, W. Liu, and
T. Chua. SCA-CNN: Spatial and channel-wise attention
in convolutional networks for image captioning. In CVPR,
2017.
[5] Y. Chen, J. Li, H. Xiao, X. Jin, S. Yan, and J. Feng. Dual
path networks. arXiv:1707.01629, 2017.
[6] F. Chollet. Xception: Deep learning with depthwise separa-
ble convolutions. In CVPR, 2017.
9
(a) SE 2 3 (b) SE 3 4
(c) SE 4 6 (d) SE 5 1
(e) SE 5 2 (f) SE 5 3
Figure 8. Activations induced by Excitation in the different modules of SE-ResNet-50 on ImageNet. The module is named as
“SE stageID blockID”.
[7] J. S. Chung, A. Senior, O. Vinyals, and A. Zisserman. Lip
reading sentences in the wild. In CVPR, 2017.
[8] K. He, X. Zhang, S. Ren, and J. Sun. Delving deep into rec-
tifiers: Surpassing human-level performance on ImageNet
classification. In ICCV, 2015.
[9] K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learning
for image recognition. In CVPR, 2016.
[10] K. He, X. Zhang, S. Ren, and J. Sun. Identity mappings in
deep residual networks. In ECCV, 2016.
[11] S. Hochreiter and J. Schmidhuber. Long short-term memory.
Neural computation, 1997.
[12] G. Huang, Z. Liu, K. Q. Weinberger, and L. Maaten. Densely
connected convolutional networks. In CVPR, 2017.
[13] Y. Ioannou, D. Robertson, R. Cipolla, and A. Criminisi.
Deep roots: Improving CNN efficiency with hierarchical fil-
ter groups. In CVPR, 2017.
[14] S. Ioffe and C. Szegedy. Batch normalization: Accelerating
deep network training by reducing internal covariate shift. In
ICML, 2015.
[15] L. Itti and C. Koch. Computational modelling of visual at-
tention. Nature reviews neuroscience, 2001.
[16] L. Itti, C. Koch, and E. Niebur. A model of saliency-based
visual attention for rapid scene analysis. IEEE TPAMI, 1998.
[17] M. Jaderberg, K. Simonyan, A. Zisserman, and
K. Kavukcuoglu. Spatial transformer networks. In
NIPS, 2015.
[18] M. Jaderberg, A. Vedaldi, and A. Zisserman. Speeding up
convolutional neural networks with low rank expansions. In
BMVC, 2014.
[19] A. Krizhevsky, I. Sutskever, and G. E. Hinton. ImageNet
classification with deep convolutional neural networks. In
NIPS, 2012.
[20] H. Larochelle and G. E. Hinton. Learning to combine foveal
glimpses with a third-order boltzmann machine. In NIPS,
2010.
[21] H. Lee, R. Grosse, R. Ranganath, and A. Y. Ng. Convolu-
tional deep belief networks for scalable unsupervised learn-
ing of hierarchical representations. In ICML, 2009.
10
[22] M. Lin, Q. Chen, and S. Yan. Network in network.
arXiv:1312.4400, 2013.
[23] J. Long, E. Shelhamer, and T. Darrell. Fully convolutional
networks for semantic segmentation. In CVPR, 2015.
[24] A. Miech, I. Laptev, and J. Sivic. Learnable pooling with
context gating for video classification. arXiv:1706.06905,
2017.
[25] V. Mnih, N. Heess, A. Graves, and K. Kavukcuoglu. Recur-
rent models of visual attention. In NIPS, 2014.
[26] V. Nair and G. E. Hinton. Rectified linear units improve re-
stricted boltzmann machines. In ICML, 2010.
[27] A. Newell, K. Yang, and J. Deng. Stacked hourglass net-
works for human pose estimation. In ECCV, 2016.
[28] B. A. Olshausen, C. H. Anderson, and D. C. V. Essen. A
neurobiological model of visual attention and invariant pat-
tern recognition based on dynamic routing of information.
Journal of Neuroscience, 1993.
[29] S. Ren, K. He, R. Girshick, and J. Sun. Faster R-CNN: To-
wards real-time object detection with region proposal net-
works. In NIPS, 2015.
[30] O. Russakovsky, J. Deng, H. Su, J. Krause, S. Satheesh,
S. Ma, Z. Huang, A. Karpathy, A. Khosla, M. Bernstein,
A. C. Berg, and L. Fei-Fei. ImageNet large scale visual
recognition challenge. IJCV, 2015.
[31] J. Sanchez, F. Perronnin, T. Mensink, and J. Verbeek. Im-
age classification with the fisher vector: Theory and practice.
RR-8209, INRIA, 2013.
[32] L. Shen, Z. Lin, and Q. Huang. Relay backpropagation for
effective learning of deep convolutional neural networks. In
ECCV, 2016.
[33] L. Shen, Z. Lin, G. Sun, and J. Hu. Places401 and places365
models. https://github.com/lishen-shirley/
Places2-CNNs, 2016.
[34] L. Shen, G. Sun, Q. Huang, S. Wang, Z. Lin, and E. Wu.
Multi-level discriminative dictionary learning with applica-
tion to large scale image classification. IEEE TIP, 2015.
[35] K. Simonyan and A. Zisserman. Very deep convolutional
networks for large-scale image recognition. In ICLR, 2015.
[36] R. K. Srivastava, K. Greff, and J. Schmidhuber. Training
very deep networks. In NIPS, 2015.
[37] M. F. Stollenga, J. Masci, F. Gomez, and J. Schmidhuber.
Deep networks with internal selective attention through feed-
back connections. In NIPS, 2014.
[38] C. Szegedy, S. Ioffe, V. Vanhoucke, and A. Alemi. Inception-
v4, inception-resnet and the impact of residual connections
on learning. arXiv:1602.07261, 2016.
[39] C. Szegedy, W. Liu, Y. Jia, P. Sermanet, S. Reed,
D. Anguelov, D. Erhan, V. Vanhoucke, and A. Rabinovich.
Going deeper with convolutions. In CVPR, 2015.
[40] C. Szegedy, V. Vanhoucke, S. Ioffe, J. Shlens, and Z. Wojna.
Rethinking the inception architecture for computer vision. In
CVPR, 2016.
[41] A. Toshev and C. Szegedy. DeepPose: Human pose estima-
tion via deep neural networks. In CVPR, 2014.
[42] F. Wang, M. Jiang, C. Qian, S. Yang, C. Li, H. Zhang,
X. Wang, and X. Tang. Residual attention network for image
classification. In CVPR, 2017.
[43] S. Xie, R. Girshick, P. Dollar, Z. Tu, and K. He. Aggregated
residual transformations for deep neural networks. In CVPR,
2017.
[44] K. Xu, J. Ba, R. Kiros, K. Cho, A. Courville, R. Salakhudi-
nov, R. Zemel, and Y. Bengio. Show, attend and tell: Neural
image caption generation with visual attention. In ICML,
2015.
[45] J. Yang, K. Yu, Y. Gong, and T. Huang. Linear spatial pyra-
mid matching using sparse coding for image classification.
In CVPR, 2009.
[46] J. Yosinski, J. Clune, Y. Bengio, and H. Lipson. How trans-
ferable are features in deep neural networks? In NIPS, 2014.
[47] X. Zhang, Z. Li, C. C. Loy, and D. Lin. Polynet: A pursuit of
structural diversity in very deep networks. In CVPR, 2017.
[48] B. Zhou, A. Lapedriza, A. Khosla, A. Oliva, and A. Torralba.
Places: A 10 million image database for scene recognition.
IEEE TPAMI, 2017.
A. ILSVRC 2017 Classification Competition
Entry Details
The SENet in Table 3 is constructed by integrating SE
blocks to a modified version of the 64×4d ResNeXt-152
that extends the original ResNeXt-101 [43] by following the
block stacking of ResNet-152 [9]. More differences to the
design and training (beyond the use of SE blocks) were as
follows: (a) The number of first 1×1 convolutional channels
for each bottleneck building block was halved to reduce the
computation cost of the network with a minimal decrease in
performance. (b) The first 7× 7 convolutional layer was re-
placed with three consecutive 3×3 convolutional layers. (c)
The down-sampling projection 1× 1 with stride-2 convolu-
tion was replaced with a 3 × 3 stride-2 convolution to pre-
serve information. (d) A dropout layer (with a drop ratio of
0.2) was inserted before the classifier layer to prevent over-
fitting. (e) Label-smoothing regularisation (as introduced in
[40]) was used during training. (f) The parameters of all BN
layers were frozen for the last few training epochs to ensure
consistency between training and testing. (g) Training was
performed with 8 servers (64 GPUs) in parallelism to enable
a large batch size (2048) and initial learning rate of 1.0.
11


 WMS仓库系统
WMS仓库系统