材料科学基础II讲稿(5-8章).pdf
- 文件大小: 796.25KB
- 文件类型: pdf
- 上传日期: 2025-08-22
- 下载次数: 0
概要信息:
材料科学基础 II
(第五章至第八章)
授课讲稿
孟 亮
办公室:曹光彪主楼 111 号
电子信箱:mengliang@zju.edu.cn
电话:0571-87951027, 13857117681
第五章 相变过程
§ 5-1 相变的分类
一、按热力学分类
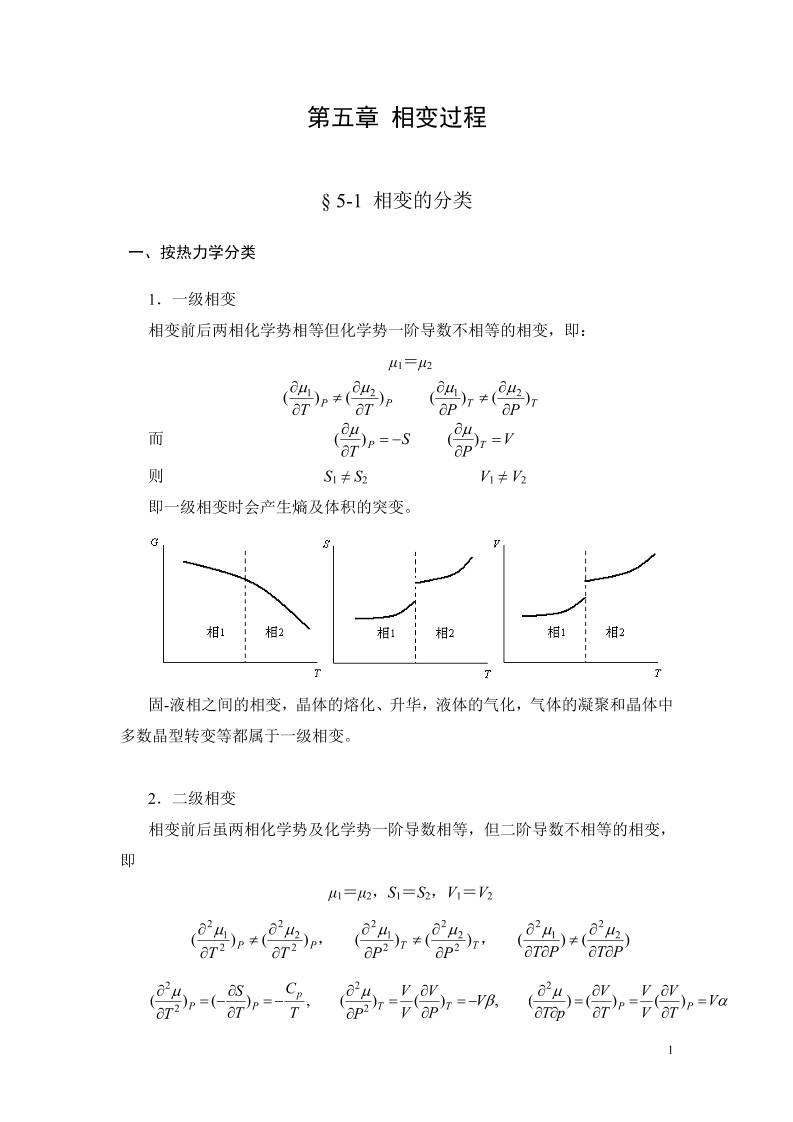
1.一级相变
相变前后两相化学势相等但化学势一阶导数不相等的相变,即:
μ1=μ2
PP TT
)()( 21
TT PP
)()( 21
而 S
T P
)(
V
P T
)(
则 S1 ≠ S2 V1 ≠ V2
即一级相变时会产生熵及体积的突变。
固-液相之间的相变,晶体的熔化、升华,液体的气化,气体的凝聚和晶体中
多数晶型转变等都属于一级相变。
2.二级相变
相变前后虽两相化学势及化学势一阶导数相等,但二阶导数不相等的相变,
即
μ1=μ2,S1=S2,V1=V2
)()()()()()( 2
2
1
2
2
2
2
2
1
2
2
2
2
2
1
2
PTPTPPTT
TTPP
,,
V
T
V
V
V
T
V
pT
V
P
V
V
V
PT
C
T
S
T
PPTT
p
PP
)()()(,)()(,)()(
2
2
2
2
2
1
式中 TP
V
V
)(
1
称为压缩系数; PT
V
V
)(
1
称为热膨胀系数。
二级相变时,两相化学势、体积及熵均无突变,但比热 CP、β、α均要产生
突变。
合金的有序-无序转变;铁磁性、顺磁性转变、超导态转变等都属于二级相变。
3.n 级相变
当相变时两相化学势、化学势的一阶导数和二阶导数均相等,但三阶导数不
相等时称三级相变。依次类推,当两相化学势的(n-1)阶导数相等但 n 阶导数不
相等时称 n 级相变。
二级以上的多级相变并不常见。
二、按相变方式分类
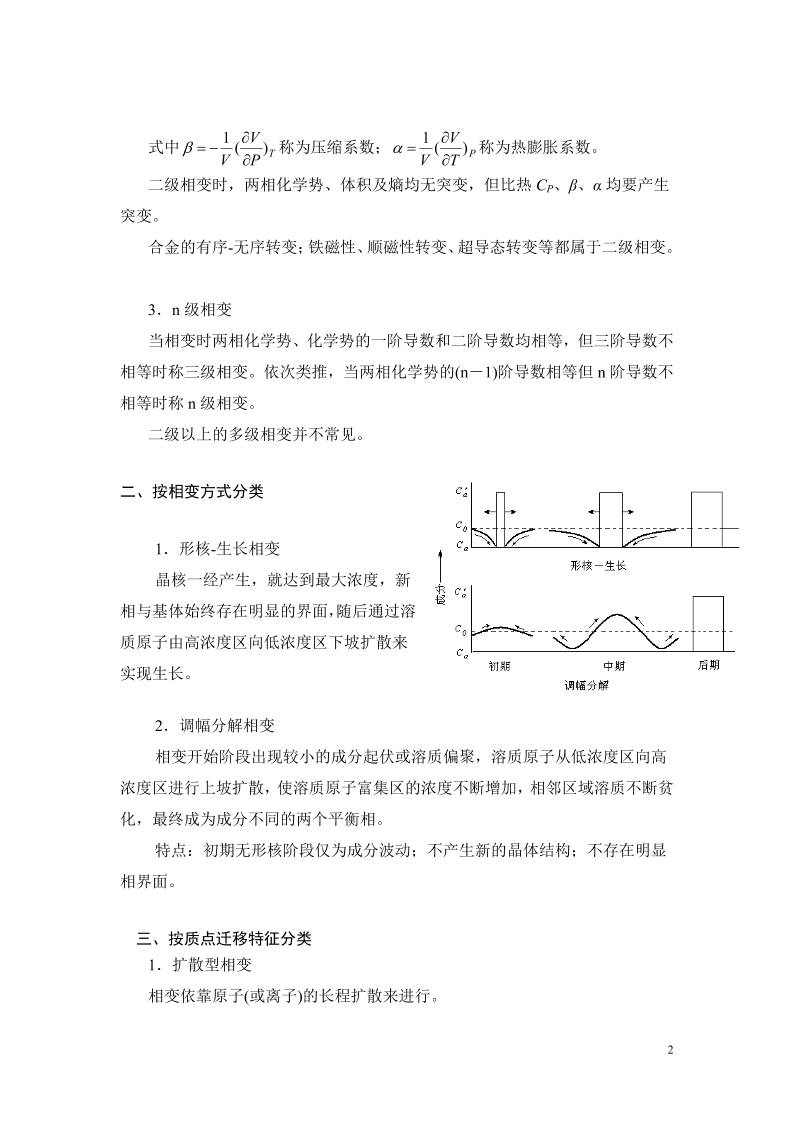
1.形核-生长相变
晶核一经产生,就达到 大浓度,新
相与基体始终存在明显的界面,随后通过溶
质原子由高浓度区向低浓度区下坡扩散来
实现生长。
2.调幅分解相变
相变开始阶段出现较小的成分起伏或溶质偏聚,溶质原子从低浓度区向高
浓度区进行上坡扩散,使溶质原子富集区的浓度不断增加,相邻区域溶质不断贫
化, 终成为成分不同的两个平衡相。
特点:初期无形核阶段仅为成分波动;不产生新的晶体结构;不存在明显
相界面。
三、按质点迁移特征分类
1.扩散型相变
相变依靠原子(或离子)的长程扩散来进行。
2
晶型转变;熔体中的析晶;调幅分解;有序化转变;气-固相变;液-固相变
等。
2.无扩散型相变
相变过程中不存在原子(或离子)的扩散,原子需经有规则的协同位移使点阵
改组。
低温下进行的纯金属同素异构转变;马氏体相变等。
3
§ 5-2 纯金属的结晶(液-固相转变)
一、结晶过程
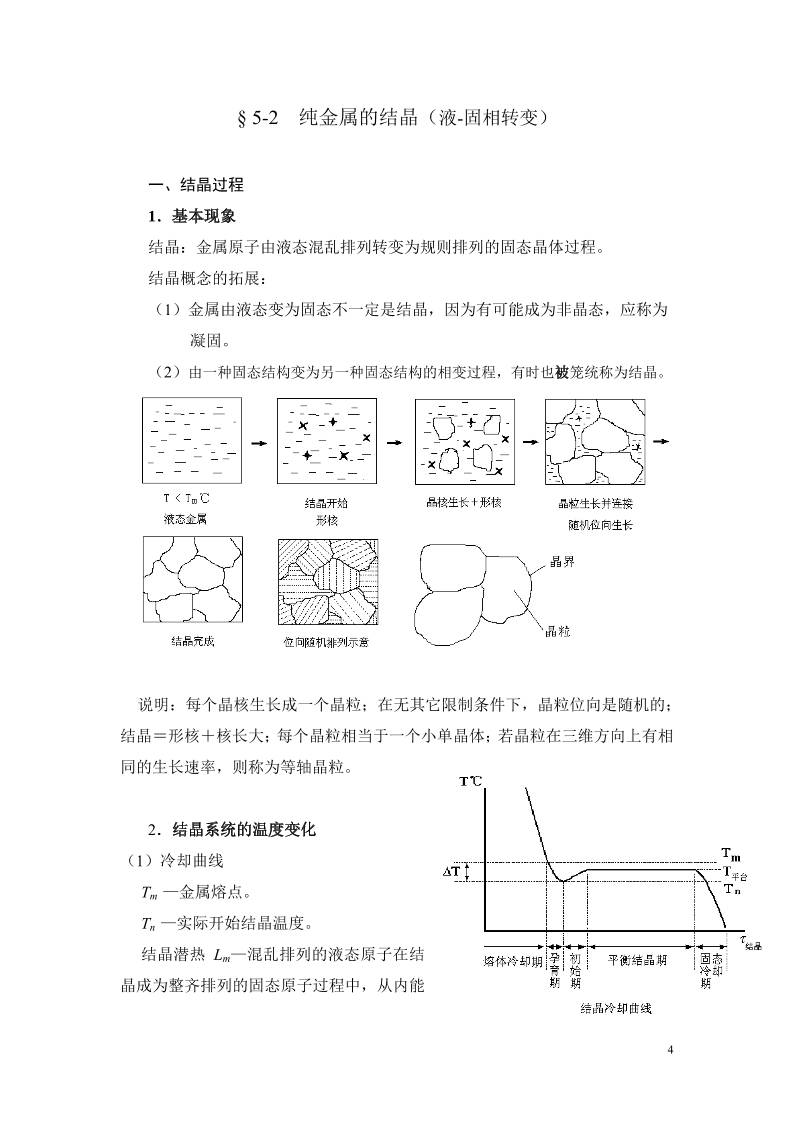
1.基本现象
结晶:金属原子由液态混乱排列转变为规则排列的固态晶体过程。
结晶概念的拓展:
(1)金属由液态变为固态不一定是结晶,因为有可能成为非晶态,应称为
凝固。
(2)由一种固态结构变为另一种固态结构的相变过程,有时也被笼统称为结晶。
说明:每个晶核生长成一个晶粒;在无其它限制条件下,晶粒位向是随机的;
结晶=形核+核长大;每个晶粒相当于一个小单晶体;若晶粒在三维方向上有相
同的生长速率,则称为等轴晶粒。
2.结晶系统的温度变化
(1)冷却曲线
Tm —金属熔点。
Tn —实际开始结晶温度。
结晶潜热 Lm—混乱排列的液态原子在结
晶成为整齐排列的固态原子过程中,从内能
4
较高状态转变为内能较低状态所释放出的热量。
熔体冷却期:T>Tm,未过冷熔体,系统热量散失过程。
孕育期:Tm>T>Tn , 过冷熔体,开始形核,但结晶潜热小于散失热量。
初始期:TnSS,或者在
G~T 关系曲线中 GL比 GS 更陡。
根据上述条件做 G~T 关系图。交点温度时有 ΔG=GS-GL=0,即 T=Tm。
仅当在 T 0。
显然,ΔT 越大,系统的 ΔG 越大,结晶的驱动力越大。
4.结晶的结构条件
X 射线分析表明,液态金属原子并非完全理想混乱排列,存在微观的、局部
的有序排列原子集团。这些原子集团时聚时散,此起彼伏,处于不断变动之中。
结构起伏:金属液体中某一瞬时、某一微区出现的原子规则排列的现象。
结构也称为“相起伏”或“近程有序”。结晶后的金属晶体便相应为“远程
有序”。
因此,通常所说的液态金属中原子的混乱排列实际是指远程无序状态。
晶胚:在过冷金属液体中的近程有序原子集团。
说明几点:(1)晶胚仅指在过冷金属液体中的相起伏,在 Tm 温度以上液体
中也有相起伏,但不能称为晶胚;(2)仅有某些晶胚,尤其是大尺寸晶胚才有可
能成为晶核,并非所有晶胚都能成为晶核;(3)仅有原子规则排列方式与金属晶
体结构相同的晶胚才有可能成为晶核,并非原子以任何方式规则排列的相起伏都
可成为晶核。
结晶的结构条件:金属液体中存在结构起伏。
结晶的结构条件是金属液体本身固有的;结晶的热力学条件(ΔT > 0)是外
部提供的。
二、形核
1.均质形核
晶核在过冷金属液体中随机位置出现的形核方式称为均质形核,也称均匀形
6
核。
均质形核依赖于过冷金属液体中随机出现的某些晶胚继续长大而实现。
(1)临界晶核
过冷液体局部原子某瞬时由混乱排列变为规则排列形成晶胚,并增加了液固
表面。设这部分原子的单位体积自由能变化为 ΔGV,且应有 ΔGV < 0,晶胚体积
为 V,单位液固表面自由能变化为 σ,晶胚表面积为 A。则晶胚形成时系统的总
的自由能变化 ΔG 可写成:
ΔG = VΔGV + Aσ
显然,上式第一项为负值(因 ΔGV < 0),构成形核驱
动力;第二项为正值,构成形核阻力。
为简便,设晶胚为球状,半径为 r,则上式可写成:
23 4
3
4
rGrG V
由于 ΔGV < 0 及 σ>0,根据上式做出 G~r 曲线,可见:
当 r < rc时,晶胚体积小,比表面积大,表面自由能
的增加大于体积自由能的降低,故此时 ΔG >0,晶胚不能
稳定存在,发展趋势是 r 降低,即自发行为是消失。
当 r0 >r > rc时,虽此时仍有 ΔG >0,但晶胚长大将使 ΔG 降低,即晶胚可成
为晶核。
当 r=rc时,晶胚长大或缩小均有可能,即成为晶核的几率为 50%,称为临
界晶核, rc即为临界晶核半径。
当 r > r0 时,系统 ΔG <0,直接成核。
因 rc是曲线上的极大值,可利用求极值的方法求出 rc。
令 23 4
3
4
rGrG V 的一阶导数为零,即
084
)( 2
rGr
r
G
V
由此求出临界晶核半径: rc=-
VG
2
7
(2)临界晶核与过冷度的关系
由于结晶时的单位体积自由能变化: ΔGV=ΔH-TΔS
其中 ΔH 为等温等压条件下由结晶引起的热焓变化,即为结晶潜热 Lm,因结
晶是系统向环境放热,故用负值表示,即
ΔH=HS-HL=-Lm
ΔS=SS-SL为等温等压条件下由结晶引起的熵变,当 T=Tm时,结晶系统两
相平衡,根据熵的热力学基本概念,应有:
m
m
T
L
S
因结晶是原子由混乱排列变为规则排列,故此熵变为负值。
将常数 ΔH=-Lm及 ΔS=Lm/Tm代入 ΔGV=ΔH-TΔS,得到:
T
T
L
T
TT
L
T
L
TLG
m
m
m
m
m
m
m
mV
上式再次说明若使 ΔGV <0,必须过冷度 ΔT > 0。
将 T
T
L
G
m
m
V 代入 rc=-
VG
2
,得到
TL
T
r
m
m
c
12
或
T
rc
1
即 ΔT 越大,则临界晶核半径可以越小,过冷液体中有尺寸条件成为晶核的
晶胚的数量越多,即直径 r≥rc 的晶胚数量越多,形核率越高,系统中晶粒数目
越多,晶粒越细小。
(3) 形核功与过冷度的关系
当 r0 >r > rc时,晶胚可以成为晶核,但此时 ΔG >0,不符合热力学原理,如
何解释?
能量起伏:
结晶体系能量仅是宏观的统计平均值,对于微观局部区域,其能量在不同时
间可出现高于或低于平均值的现象。因此微观局部现象往往不能直接用宏观统计
量表达的规律来说明。例如纳米效应即不能用宏观现象的一般规律来解释。
8
能量起伏(能量涨落):
金属液体中局部微小区域内能量动态偏离平均值的现象。
由于能量起伏的存在,在某瞬间某微区体积内的实际自由能可比平均自由能
高,并足以补偿 r0 >r > rc尺寸晶胚的表面自由能的增加,亦即此晶胚在此区域
内出现时的仍属于自由能降低过程,在局部范围内仍符合热力学定律。
临界形核功:
当 r=rc 时,所需能量起伏补偿的形核自由能 大,此部分能量称为临界形
核功 ΔGC。
根据 23 4
3
4
rGrG V
则 23 4
3
4
cVcc rGrG
将 rc=-
VG
2
代入,得 2
3
4
cc rG
因为临界晶核表面积 Ac=4πrc
2
故 (表面自由能)
3
1
)(
3
1
cc AG
说明临界晶核形成时,体积自由能的下降仅能补偿
三分之二的表面自由能升高,另外三分之一表面自由能的升高必须依靠微区内的
能量起伏来提供。
将
TL
T
r
m
m
c
12
代入 2
3
4
cc rG ,可得:
22
23 1
3
16
TL
T
G
m
m
c
即
2
1
T
Gc
可见,ΔΤ 越大,临界形核功越小,即形核所需的能量起伏就越小,体系中
可以有更多能量起伏处的晶胚可以成核,同样使形核率增加。
因此,当 ΔΤ较大时,形核所需系统的结构条件(结
构起伏)和能量条件(能量起伏)较低(临界晶核半径
和临界形核功均较小),有利于形核数量增加。
(4) 形核率与过冷度的关系
9
形核率:单位时间、单位体积内过冷金属液体中的晶核形成数量。
高的 ΔΤ对形核率的作用表现为矛盾的两方面:
一方面,所需形核功较小,受形核功控制的形核率 N1 较高;另一方面,开
始结晶温度较低,原子扩散速率慢,受原子扩散速率控制的形核率 N2 较低。
总的形核率:N=N1·N2
因此,必然出现一个合适的 ΔΤ使形核率达到 大。
对于实际金属液体而言,由于结晶趋向较大,ΔΤ 增大
到某一值后则 N 急剧增大而迅速结晶完毕,不存在曲线后
半部分。
有效过冷度 ΔΤp:
使金属液体均质形核率急剧增大时的过冷度。对于纯
金属,一般 ΔΤp≈0.2Tm。
2. 非均质形核
非均质形核:在过冷金属液体结晶时,优先依据于其它现成固态表面的形核
过程。
(1) 形核功
若过冷金属液体中存在有利于形核的固态
表面,则晶核形成时所需的表面自由能便会减
少,形核便可能优先选择这些位置,形核地点不
是随机的,即成为非均质形核。
设液体中有现成固态表面 B,由液相 L 在 B
上形核为球冠状,其曲率半径为 r,润湿角(接
触角)为,各界面单位表面能分别为L、LB
及B,则增加的表面积为B 及L,减少的表面积为B。则此形核表面自由
能变化为:
ΔGs=LL+BB-BLB
当张力彼此平衡时有 LB=B+Lcos
10
球冠表面积 L=2πr2(1-cos),球冠底圆面积B=LB=πr2(1-cos2)
∴ ΔGs=πr2L(2-3 cos+cos3)
球冠状非均质形核后总的自由能变化为:ΔG 非=ΔG 体+ΔGs
其中 ΔG 体=V 球冠·ΔGV,ΔGV为单位体积自由能。
球冠体积为
3
coscos32 3
3
rV球冠
则 ΔG 非 = ΔG 体 + ΔGs =
)coscos32(
3
coscos32 32
3
3
rrG LV
整理得 )
4
coscos32
()4
3
4 3
23
LV rGrG (非
与均质形核的自由能变化 23 4
3
4
rGrG V均 相比,有
)
4
coscos32
(
3
均非 GG
即仅多出一项系数 )
4
coscos32
(
3
。
讨论:
当 θ=0 时,晶核与基底完全润湿,cosθ=1,ΔG 非=0,基底为形核理想表
面;
当 θ=π 时,晶核与基底完全不润湿,cosθ=-1,ΔG 非=ΔG 均,基底无作
用;
当 0<θ<π 时,-1< cosθ<1,为一般基底情况,ΔG 非<ΔG 均,促进形核。一
般情况下,当基底与晶核之间点阵类型和点阵常数越相近时,润湿角越小,越有
利于促进形核。
(2) 临界晶核曲率半径
令 0
)(
r
G非 解出非均质形核的临界曲率半径:rc(非)=-
V
L
G
2
11
rc(非)与均质形核时的 rc=-
VG
2
相同。注意的是在 rc(非)=rc 时,非均质
形核仅是一个球冠,其体积比均质形核的球体小,所需结构起伏体积要小,结构
条件有利于形核。
(3) 现成基底几何形状的影响
当 θ角一定时,在相同的晶核曲
率半径条件下,界面几何形状上凹
越大,非均质形核体积越小,所需
结构起伏越小,越易结晶。故固体
杂质、模壁表面的微裂纹、凹坑等
处更易首先形核。
(
成界面基底面积的减少
出现下降趋势。
三
,是液固界面向液
相中
迁移速率 vα→L 及 vL→α。根据界面反应动力学关系曲线,可以
得出
4) 非均质形核率
与均质形核的区别:
因形核功较小,所需有效过冷度较小。
因基底各处润湿角及表面几何形状不同,各处形核难易
程度不同,因此随过冷度升高,形核率逐渐升高,到达 大
值后,可能由于现 ,有时形核率还会
、晶体的长大
动态过冷度
结晶微观过程:液相中原子迁移进入
固相表面的点阵位置
推进的过程。
在液固界面上,任一原子存在两种相反的运动趋势:向液相迁移和向固相
迁移,即存在两种
如下结果:
12
当>m 时,ΔT<0,vα→L>vL→α,液-固界面向固相推进,为熔化过程。
当=m时,ΔT=0,vα→L=vL→α,结晶达到平衡状态,液-固界面不迁移。
当<m时,ΔT>0,vα→L<vL→α,液-固界面向液相推进,即晶核生长,为
结晶
ΔTk:使得液-固界面原子向固相迁移的速率大于向液相迁移所
需的过冷度。
约 0.01~0.05℃,接
缓慢冷却条件下的实际过冷度。
ΔT: 熔点与实际开始结晶温度之差,随冷速增大而增大,无
固定
有效过冷度 ΔTp:
,均质形核时约为 0.2Tm, 非均质形核
动态过冷度 ΔTk:
冷却曲线上平台温度与熔点之差,即约为 0.01~0.05℃。
据能量 低原则,与原子
特性
则,一般为
晶体
曲折状或台阶状,台阶夹角为 密排
面之
角处外,界面基本是平整光
滑的
过程。
动态过冷度
ΔTk取决于界面微观结构,其值较小,
近极
几个过冷度的区别:
过冷度
值。
金属液体中形核率急剧增加的过冷度,与冷速有关,在一
般冷却速率条件下
时约为 0.02Tm。
反映液-固界面原子运动出现结晶趋势的过冷度,约等于
2.液-固界面结构
液-固界面由原子构成,在排列方
式上也必然依
有关。
(1)平滑界面(小平面界面)
界面上原子排列比较规
结构的 密排晶面。
宏观:因密排面暴露在液-固界面,
故界面为
间夹角。
微观:除台阶交
结晶学平面。
13
主要存在于一些非金属化合物的结晶中。
过渡层厚度上原子排列高低不平,仅约一半左右的点阵位
置被
于一些类金属和半导体元素等,其液-固界面往往是混合型的。
固态原子占据点阵位
置分数 x=NA/N 的
与元素特性有关,取决于熔点
及熔
说明
低,说明界面几乎被固相原子占据约一
半时
α=2.0~5.0 时,情况比较复杂,一般为混合型界面。
法向推进,故称为垂
直生
(2)粗糙界面(非小平面界面)
界面上在几个原子
固态原子占据。
宏观:基本平直。
微观:粗糙不平。
主要存在于金属元素的结晶中。
对
(3)液-固界面结构的热力学因素
杰克逊(K.A.Jackson)运用统计力学研究
了液-固界面局部平衡状态结构,认为界面相对
自由能变化 ΔG 相对是界面
函数:
ΔG 相对=α·f(x)
系数 α 主要
化潜热。
当 α≥5.0 时,在 x=0 或 1 处,ΔG 相对 低,
界面几乎均被固相原子占据时能量 低,应该属于平滑界面。
当 α≤2.0 时,在 x≈0.5 处,ΔG 相对
能量 低,应该属于粗糙界面。
当
3.晶体长大机制
(1)粗糙界面的推进
粗糙界面上存在的空余位置均可等效地直接接
纳液态原子进入,故界面基本沿
长机制或连续生长机制。
14
大多数金属均以这种界面生长机制结晶,所需动态过冷度小,ΔTk≈0.01~0.05
℃,长大速率较高。
据点阵位置,形成横向生长或台阶生长机制。这
些小
横向生长铺满整个液-固界面,即使得液-固界面推进了二维晶核厚度
的距
固界面围绕位错中心以螺旋方式连续生长,并一直保持液-固界面为螺旋
面。
分析模型仍不满意,所需能
量均很大,界面推进速率均较低,其 ΔTk≈1~2℃。
体长大形态取决于液-固界面前沿温度温度分布和界面结构两个因素。
面前沿的液相内部温度越高,即
(2)平滑界面的推进
界面点阵位置全部被固态原子占据,液态单个原子难以直接稳定依附其上,
不能以垂直生长方式使界面推进。根据能量计算分析,此时的单个液相原子只能
依靠于界面上的某些小台阶而占
台阶的来源主要有两种:
二维晶核。液体中首先依靠能量起伏和结构起伏形成二维薄片状晶核依附于
液-固界面,交界处形成台阶,其它液态原子再持续横向连接变成固态原子,直
至二维晶核
离。
螺型位错露头。在螺型位错露头处为结晶台阶,液态原子可以依附此露头处,
使液-
无论二维晶核机制还是螺型位错露头机制生长,
4.晶体长大形态
晶
(1)液-固界面前沿温度分布
正温度梯度:越远离液-固界
dx
dT
>0。例如
从模壁处开始结晶时的情况。
负温度梯度:越远离液-固界面前沿的液相内部温度越低,即
dx
<0。例如
从液体中部
dT
开始形核后的晶体长大,结晶潜热释放使晶体温度上升而高于周围环
境温度。
15
(2)平面状生长
条件:液-固界面前沿必须是正的温度梯度。
液-固界面推进时,若某处生长速率较快,则会突出伸入过冷度更小的液相内
部,其生长速率变慢或停止。即不可能存在界面局部优先生长条件,结果只能是
界面各处均以相同速率生长。
对于粗糙界面,几乎与 Tm等温面重合。
对于平滑界面,各小台阶与 Tm等温面形成一定交角,但整体上也呈平面状。
(3)树枝状生长
条件:液-固界面前沿必须是负的温度梯度。
若液-固界面有局部凸出,则会伸入过冷度更大的液体中,使此局部的长大速
率更快,即一旦有局部凸出,便会越来越凸出并伸长,形成“树枝状”。在主枝
干的局部若再次凸出,使枝干分叉,会形成二次枝干,二次枝干上同样会出现三
次枝干,…….., 终枝干相互接触形成树枝状结晶骨架,枝晶间隙中为尚未结
晶的液相,再依靠枝干的不断变粗使枝晶间隙越来越小,当所有剩余液体结晶后
便形成等轴晶粒。
如果金属中有杂质或其它元素富集在枝晶间隙处,则树枝轴和间隙处的耐腐
蚀能力不同,光学显微试样的枝轴与间隙的腐蚀程度不同,则会将晶粒的树枝状
形态显现出来。
为减小界面能,树枝状生长的晶轴沿着一定的结晶学位向,基本为点阵常数
较大的晶向,因为此位向上原子排列比较松散,同样依附一个原子可使晶体生长
16
距离更大一些,即生长速率可以更快一些,故液-固界面容易在此位向上凸出。
对于:
fcc 是<100>, bcc 是<100>, hcp 是<10 1 0>
在同样的负温度梯度条件下,粗糙界面比平滑界面的树枝状形态更发达、更
明显。
四、结晶理论应用
一些结晶基本理论已在实际生产中得到应用,仅举几例。
1.铸件晶粒的细化
一般情况下,常温工作的材料,晶粒越细小,强度和塑性越好,因此需要细
化组织。
依据原理及基本途径:提高形核率,降低晶核生长速率。
(1)变质处理
在液态金属中添加特定元素,在结晶前形成均匀弥散的高熔点固态颗粒,作
为随后结晶的非均匀形核核心,提高形核率,或阻碍晶粒长大。所添加的元素称
为变质剂。
变质剂形成的非均匀形核核心应符合与结晶金属结构相似、点阵常数相当的
原则。
变质机理:非均匀形核提供现成固态界面;在结晶固相中不溶解,排除在液
-固界面前沿,阻碍液态原子向固态界面的迁移,减慢液-固界面的推进速率。
加入方法:直接添加或涂于模壁。
例如:铸造低合金钢中加入钛铁粉;铸造不锈钢中添加氮化铬;铸造铜合金
中添加过渡金属氮化物或硼化物;铸造铝合金中添加 TiB2, AlB2 或 Ti 等;Al-Si
合金中添加 NaCl 或 NaF 等(细化共晶 Si 组织)。
(2)快速冷却
增加冷却速率,使 ΔT 增大,提高形核率。虽然同时使晶粒长大速率增加,
17
但以形核率增大使晶粒细化的作用为主。
方法:水冷模壁,增加导热板等。
新技术:
微晶合金—将金属液体用高速喷雾沉积在吸热能力极强的垫板或高速旋转
的轧辊上,使冷却速率>105℃/s,可得极细晶粒,甚至达到纳米尺寸。
非晶合金(金属玻璃)—若使冷速>106~107℃/s,可使形核率趋近于无穷大,
或可使晶粒尺寸趋近于不能检测到的尺度。也可通过不同尺寸原子的合适搭配,
使合金结晶生长速率较慢,在较快的冷速条件下不能充分结晶。
需要解决的问题:如何在实际生产中得到极快的冷速或大块合金的技术。
(3)振动结晶
对结晶系统采用机械、电磁或超声波振动,使液体在剧烈运动中冲击已形成
的树枝状晶体,使其碎裂为多个晶核,提高形核率。
2.单晶体制取
依据原理:一个晶核只能生长成一个晶粒。
为避免晶界的有害作用,与细晶合金相反,有些场合需要单晶体,如半导体
工业中的单晶硅,航空发动机中的单晶叶片。
方法:向金属液体中植入一个籽晶作为核心,极缓慢冷却,造成只有籽晶生
长而无新晶核形成的结晶条件。
3.定向凝固
依据原理:仅沿一维方向生长的结晶。晶粒为柱状而非等轴状。
优点:晶粒生长具有方向性则性能便有方向性(各向异性),使具有优良性
能的晶粒方向与实际受载荷方向一致,例如发动机叶片可用定向凝固使柱状晶粒
与离心力方向一致。
方法:使金属液体沿一个方向散热,并在
液-固界面前沿造成正的温度梯度。
若定向凝固合金为两相合金,其中的一个
相可以以纤维形态分布于合金中,形成纤维强
化的复合材料。
18
§ 5-3 液-液相转变
液-液相转变:
一个均匀的液相在一定的温度和组成范围内分成两个互不相溶或部分溶解
的液相。
在玻璃熔体中比较常见。两个不相溶或部分溶解的玻璃相共存现象也称为
玻璃的分相。
某些液态玻璃甚至可分成三个成分不同的液相。
一、分相规律与机制
1.热力学分相机制
以 Na2O-SiO2 系统为例。
自由能-成分曲线由两条正曲率曲线和一条负曲率曲线组成,在 T´温度下
存在公切线,E、F 为曲线拐点。
根据自由能-成分曲线推导相图的基本原理:
(1)在温度、压力、组成不变的条件下,具有 小 Gibbs 自由能的相状态
稳定;
(2)当两相平衡时,两相的自出能-成分曲线具有公切线,切线上的切点
分别表示两平衡相的成分。
则有:
当 x<Cα或 x>Cβ时,为单相稳定区。
0)( ,2
2
TpC
G
,即成分波动导致化学位向升高
方向变化,只有单相 α及 β熔体热力学 稳定。
当 CE< x<CF 时,为不稳分相区。
0)( ,2
2
TpC
G
,熔体成分任何波动均导致化学
位下降,热力学不稳定,形成熔体分相过程。
19
当 Cα<x<CE及 CF<x<Cβ时,为亚稳分相区。如果熔体分相,系统自由
能处于公切线上,比单相稳定。但此区间的 0)( ,2
2
TpC
G
,成分波动使化学位升
高,因此必须依靠能量起伏和成分起伏造成 α及 β的形核及生长来完成熔体的分
相。
当 x=CE 及 x=CF时,为曲线拐点, 0)( ,2
2
TpC
G
,熔体成分波动时系统化
学位不变,为不稳分相区和亚稳分相区交界。
随温度变化两相成分及两拐点成分变化的轨迹构成分相相图。
2.化合键分相机制
硅酸盐熔体的化合键大多是离子性的,相互间的作用程度与静电键能 E 的
大小有关:
12
2
21
R
eZZ
E
式中:Z1、Z2为离子 1、2 的电价;e 为电荷;R12为离子 1、2 之间的距离。
如果除 Si-O 键以外的第二类氧化物键能也相当高,如 Na-O 键,以致 O 很
难被 Si 夺去,在熔体中就表现为独立的离子聚集体,即出现了两个液相共存,
一个是含少量 Si 的富 Na-O 相,另一个是含少量 Na 的富 Si-O 相,导致两不同
成分熔体相。
20
§ 5-4 固-固相转变
固-固相转变:
随着温度变化,固态晶体从一种晶型转变为另一种晶型的转变。
固-固相之间的转变往往会引起材料力学、电学、磁学等待性的变化。
一、固-固相变的成核过程
新相一般在晶界上形核,相变势垒较低。
以两晶交界处形核为例。形成晶核 β时,体系自由能变化为:
ΔG2gr=-VΔGV +Aαβγαβ-Aααγαα
式中:V 为晶核 β 的体积;ΔGV为单位体积自由能变化;Aαβ、Aαα为对应界面面
积;γαβ、γαα为对应界面能。其中:
Aαβ=4πR2(1-cos)
Aαα=πR2(1-cos2)
3
coscos32
2
3
RV
γαβ与 γαα的关系为: γαα = 2γαβcos(φ/2) =2γαβcosθ
代入 ΔG2gr式求极值得:R*
2gr =-2γαβ/ΔGV
2
)cos1)(cos2(
3
16 2
2
3
*
2
V
gr
G
G
若晶粒 β 在晶粒 α 内部均匀形核,则球状晶核的 θ=π/2,自由能变化为:
21
2
3
*
3
16
VG
G
即
2
)cos1)(cos2( 2
*
*
2
G
G gr
由于 0≤θ≤π/2,故 ΔG*
2gr≤ΔG*,即在两晶交界处形核的势垒较低。
类似地,三晶交界处成核和四晶交界处成核的自由能相对变化分别为:
)]cos3(cos)
3
arccos(ctg1sin4cos
3
1
)csc
2
1
arcsin(2[
2
3 222
*
*
3
G
G gr
}
sin2
arccos)]cos3(cos4
2
sin4[cos)]
2
3cos2
arccos
3
[8{
4
3 2
2
22
2
*
*
4
cc
cc
c
G
G gr
式中: ]cos)1sin4(2[
3
2 2
1
2 c
由于 0≤θ≤π/2,故
ΔG*
4gr≤ΔG*
3gr≤ΔG*
2gr≤ΔG*
因此,晶界上成核的势垒较低,有利于新晶核的形成。
注意:大多数固-固相变都伴随有体积的变化,产生晶格应变,即此时的相
变自由能变化中应增加应变能 W,即:
ΔG =-VΔGV + SΔGS + W
为简便,上述分析未考虑 W 作用因素。
二、同质多晶转变
固态晶体在不同温度条件下发生的晶体结构转变。也称同素异构转变。
可分为位移型转变和重建型转变两种类型。
1.位移型转变
方式:通过原子的协调移动而实现固相结构转变。
特点:不需要破坏化学键或改变 邻近的配位数,只需原子在原位少许位
移,相变势垒低,速度快,并且在一个确定的温度下完成。
例如:α-石英↔β-石英。
22
2.重建型转变
方式:通过原子扩散而实现固相结构转变。
特点:不能简单通过原子位移来实现,需要引起化学键的破坏和重新组合,
相变势垒较高,转变速度缓慢,因此高温下的结构常可被冷却到室温而处于介稳
状态。
例如:α-石英↔α-磷石英。
三、有序-无序转变
1.有序参数
无序排列:由 A,B 原子组成的晶体中原子在晶体点阵中随机排列。
有序排列:由 A,B 原子组成的晶体中原子在晶体点阵中各自占据确定位置。
部分有序排列:由 A,B 原子组成的晶体中部分原子在晶体点阵中占据确定
位置。
有序参数:
WR
WR
R 表示占据有序位置原子数目,W 表示占据随机位置原子的数目。
用 ξ可以表达有序化程度。
ξ=1 为完全有序(W=0);
ξ=0 为完全无序(即有 W=R);
0<ξ<1 为部分有序。
2.转变类型
(1)原子位置转变型
根据两种原子的排列状态区分的有序-无
序转变。
例如:对于 β-黄铜,其化合物 CuZn 的有
序排列状态为 Cu 原子的简单立方晶体和 Zn 原
子的简单立方晶体相互穿插而成,每种原子规
则占据各自点阵位置,为有序状态。但在一定
23
温度以上,原子活性较大,可以各自脱离原正常位置而任意占据化合物中任意点
阵位置,变为无序状态,当 ξ=0 时相当于任一位置被 Cu 或 Zn 原子占据的几率
均为 50%。
(2)物理状态转变型
指晶体中某些物理特性排列的有序-无序转变。
铁磁-顺磁转变:
主要出现在磁性晶体中,如 Fe, Co, Ni, Y
和一些氧化物 CrO2, EuO 及 La1-xCaxMnO3等。
在局部范围内的原子或离子自发自旋磁矩
沿一个方向排列,形成自发磁化方向有序排列
的磁畴。
若在一定温度以上(居里温度),这些有
序的铁磁相转变为无序的顺磁相。
铁电-顺电转变:
主要存在于铁电陶瓷晶体中,如 BaTiO3等。铁电
材料内部存在电偶极矩沿自发极化方向排列的电畴。
当无外电场存在时,电畴在晶体中分布杂乱无章,使
整个晶体表现为电中性。当外加电场作用于晶体时,
电畴转到电场方向,产生铁电性能。
若在一定温度以上(居里温度),这些有序的铁
电相转变为无序的顺电相。
24
§ 5-5 气-固(液)相转变
传统的金属及非金属材料通常采用熔炼(如金属)、烧结(如陶瓷)及熔融(如
玻璃)等方法来制备。但随着新材料制备技术的发展,直接用气相凝聚或沉积方
法来制备材料已越来越广泛地得到了应用。尤其在薄膜材料、复合材料和纳米材
料的制备中,气相沉积方法具有无可替代的作用。
气相沉积过程实际即为气-固相转变过程,一般分为分为物理气相沉积
(PVD)和化学气相沉积(CVD)两大类。
一、蒸发与凝聚的平衡
蒸发:固体原子具备一定动能克服原子间作用力离开固体表面的过程。
凝聚:蒸气相原子在固态表面形成键合变为固态原子的过程。
在一定温度条件下,固体表面的蒸发与凝聚过程共存,蒸发及凝聚速率取
决于蒸发原子流速 Jv及凝聚原子流速 Jc。
Jv = αv(2πMRT)-1/2(P ─ Pc)
Jc = αc(2πMRT)-1/2 (P ─ Pc)
其中:αv为蒸发系数;αc为凝聚系数;M 为原子量;R 为气体常数;T 为
绝对温度;P 为气体压力;Pc为平衡蒸气压。
蒸发过程:Jv>Jc
凝聚过程:Jv<Jc
动态平衡过程:Jv=Jc
二、物理凝聚
在材料制备技术中,固体或液体材料中的蒸发主要用于获得原子或分子颗
粒流,然后使其沉积在一些固态基体上。如薄膜的制备。沉积过程主要是凝聚过
程。
1.物理凝聚过程
物理凝聚:由蒸气相中直接析出固相的凝聚过程。
25
形成条件:蒸气温度低于固体熔点或实际气体压力大于固体饱和蒸气压。
在许多情况下,晶体由气相析出时会出现液相过渡层。
蒸气相转变为固相时,当凝聚驱动力较小时,可在基体固态界面以二维晶
核方式形核,大于临界尺寸的二维晶核可结合蒸气中的原子不断长大。驱动力增
加后,二维晶核可以演变为球冠状晶核依附于固态基体表面,甚至可在蒸气中直
接形成球状晶核。
2.物理凝聚热力学
已知摩尔自由能 Gi与活度 ai的关系为: Gi=G0+RTln ai
可用蒸气压 P 代替活度 ai,则: Gi=G0+RTln P
当温度 T 时的蒸气压 P 变到固体蒸气压 Pe时,自由能的变化为:
ΔG=RTln Pe-RTln P=RTln(Pe/P)
类似于液-固结晶中的分析,气-固凝聚中固相形核时系统的自由能变化也 ΔG
可写成:
ΔG =VΔGV+Aσ
其中:ΔGV为单位体积自由能变化,且应有 ΔGV < 0,V 为晶核体积,σ为单位气
-固表面自由能变化,A 为晶核表面积。若晶核为球冠状,润湿角为 θ,球冠曲率
半径为 r,则
球冠体积为:
3
coscos32 3
3
rV , 球冠表面积为:=2πr2(1-cosθ)
26
单位体积的凝聚驱动力可表示为:
P
P
V
RT
G e
V ln
类似在液-固非均匀形核的分析,气-固凝聚形成临界
晶核的驱动力可表示为:
)(
3
16
2
3
*
f
G
G
V
,
4
coscos32
)(
3
f
临界晶核的形成速率为:
KT
G
neJ
*
*
其中:ω为单位时间内依附于晶核的原子数;n 为气相中原子浓度。
对于三种形状晶核:
ΔG*
二维<ΔG*
球冠<ΔG*
均匀
3.物理凝聚的应用
气相沉积(PVD)技术。主要用于薄膜制备和表面改性。
目前已发展了多种工艺方法。
分类 工艺方法名称 基本原理 特点
真空蒸镀 电阻加热蒸镀
电子束加热蒸镀
激光加热蒸镀
高频感应加热蒸镀
离子蒸镀
利用有效热源将
金属、合金或化合物
蒸发,然后在基体表
面上凝聚
理论上可以制
备任何晶体薄
膜;
结合力弱;
膜密度较低;
工艺简单方便
阴极溅射 二级溅射
三级溅射
磁控溅射
对置溅射
离子束溅射
吸收溅射
利用荷能粒子轰
击靶材(阴极),使
靶材逸出原子并以
一定动能沉积在基
体表面
溅射效应可净
化沉积表面;
涂层温度低,变
形小;
结合力较强;
设备复杂
离子镀 高频离子镀
空心阴极放电离子
镀
感应加热离子镀
活化蒸发离子镀
低压等离子镀
利用惰性气体的
辉光放电使金属或
合金蒸气离子化。离
子经电场加速沉积
在带负电荷的基体
表面
结合力很强;
均镀性好;
膜密度高;
设备复杂
另外,尚有分子束外延、脉冲激光沉积、离子注入、激光表面合金化等技
术。
27
三、化学凝聚
1.化学凝聚过程
化学凝聚:由蒸气相通过化学反应析出固相的凝聚过程。
相对于物理凝聚,化学凝聚的温度一般较高。
化学凝聚过程中典型的化学反应有如下类型:
热分解反应 物质蒸气在高温基体上分解制备固相晶体的过程。
如由硅烷分解出硅: SiH4(气)→Si(固)+2H2(气)
如由羰基镍分解出镍:Ni(CO)4(气)→Ni(固)+2HCl(气)
还原反应 以 H2为还原剂在蒸气中还原制备固相晶体的过程。
如 SiCl4(气)+2H2(气)→Si(固)+4HCl(气)
WF6(气)+3H2(气)→W(固)+6HF(气)
氧化反应 以 O2为氧化剂在蒸气中氧化制备固相晶体的过程。
如 SiH4(气)+O2(气)→SiO2(固)+2H2(气)
或 SiH4(气)+2O2(气)→SiO2(固)+2H2O(气)
另外尚有水解反应、氮化反应、氨解反应、碳化反应、歧化反应、合成反应、
基体反应、综合反应等。
2.化学凝聚的应用
化学气相沉积(CVD)技术。同样用于薄膜制备和表面改性。
工艺特点:涂层物质来源于导入反应室的气体;反应温度高(500~1200ºC);
在基体和膜层之间易形成扩散层,因而有比 PVD 更强的结合力;设备简单,易
实现批量生产;高温反应易引起工件变形及晶粒粗化。
应用场合:
绝缘体薄膜:SiO2, Al2O3,金属氧化物,硅酸盐,硼硅酸盐,铝硅酸盐,氮
化硅及氮氧化硅等。
半导体膜:Si, Ge, AlN, AlP, AlAs, GaN, GaP, GaAs 等。
导体膜:W, Re, Rh, Ta 等。
超导体膜:Nb3Sn, Nb3Ge 等。
28
耐磨涂层:TiC, TiN, Ti(C, N), Cr7C3, Al2O3等。
29
第六章 合金结晶及其组织形态
§ 6-1 合金凝固时的溶质分布
一、溶质在液固两相中的分布
1.合金结晶的基本规律
一般合金结晶首先经过匀晶相区;
结晶过程=形核+核长大;
形核为液固界面形成过程,核长大为液固界面向液相区方向推进过程;
无论是否平衡结晶,液固界面上溶质的浓度应分别处于平衡相图的液、固相
线上;
无论是否平衡结晶,随温度下降,液固界面上固相成分沿相图固相线变化,
液相成分沿相图液相线变化;
造成液固界面成分变化及维持相平衡均由原子的迁移和扩散实现;
不平衡结晶时,晶粒内部与晶界处溶质浓度不同,导致枝晶偏析。
以上总结的结晶基本规律与现象是分析结晶时溶质分布规律的基础。
2.平衡分配系数
具有匀晶转变的合金 C0 结晶,
液固界面推进时成分分别沿相图液
固相线变化。若在 T0温度时,液固
界面液相成分为CL,固相成分为CS,
则定义其比值 k0为平衡分配系数:
L
s
C
C
k 0
根据相图液、固相线斜率不同,
平衡
k0<1 时的值越小及 k0>1 时的值越大,液、固两相中溶质平衡浓度
分配系数有 k0<1 及 k0>1 之分。
k0数值大小反映了液固相线偏离程度或在一定温度下液、固两相中溶质浓度
的差别程度。
30
差别
将液、固相线近似看作直线,则在任何温度下 k0均为常数。
分析由于溶质分布在界面和内部的变化引起界面
推进而形成结晶的过程如下:
越大。
若
二、平衡结晶时的溶质分布
结晶条件:平衡结晶,溶质有充分时间迁移,在液固两相中完全混合。
合金成分为 C0 的合金结晶,k0<1(固相中溶质含量低于液相)。取铸模中结
晶单元体,或单向散热的棒状合金模型,设液固界面推进方向与散热方向相反,
结晶总长为 L。根据平衡相图,
不断降温使上述过程持续, 终在凝固终了温度使固相整体达到 C0 成分,
结晶
液相中,成分均匀化除依靠原子扩散外,更依靠液体中的对流,速率较快。
结束。
在固相中,成分均匀化依靠原子扩散,速率较小;
在
31
三、液相完全混合时的溶质分布
结晶条件:缓慢结晶。固相中溶质扩散较慢而近似认为原子在固相中无混合,
液相
混合,则界面成分按固相线变化,内部成分连续变化,平均成分
偏离固相线。
中溶质有时间可以均匀混合。
由于液相混合充分,任一温度下液相界面和内部成分相同,可按液相线变化。
固相中溶质不能
定向结晶的合金棒 终成分分布出现偏析。由图示溶质贫化区面积应等于富
集区面积可以导出描述在合金棒任一位置 Z 的溶质浓度 CS的表达式:
1
00
0)1( k
S L
CkC
可见,当 k0<1 时,指数项为负值,即随 Z 增大,溶质浓度上升(但当 Z=L
时,CS→∞,因此只适用于 Z1 时溶质分布曲线如何?
但固相中溶质无混合,
液相
,越大׀ k0-1׀
CS 变化越明
重。
思
四、液相完全不混合时的溶质分布
结晶条件:极快结晶。不
中溶质也来不及混合。
在某温度下结晶时由固相排出的多余溶质全部
富集在界面前沿不能依靠对流混合均匀(由于结晶速
32
率快,界面高速推进形成界面层流层,溶质在层流层中仅能靠扩散迁移),形成
溶质富集扩散边界层,边界层中溶质靠扩散作用形成一定浓度梯度。
由于溶质在两相中均无混合,界面浓度瞬时平衡成分无法用相图分析,设界
面液相瞬时成分为(CL)i,则固相成分为(CS)i=k0(CL)i,边界层外液相中溶质浓度
用(CL)B表示,且(CL)B=C0。结晶初期,溶质富集扩散边界层开始建立,随(CL) i
不断升高,(CS)i 相应上升,当(CS)i=C0 时,不再有多余溶质排出,则(CL) i 不再
继续升高并保持稳定,进入溶质分布的稳态生长阶段,固相溶质浓度保持为 C0。
终,溶质富集层结晶形成偏析。
不考虑初始瞬态区及偏析区的浓度分布可表示为:CS=C0
五、液相部分混合时的溶质分布
结晶条件:较快结晶。结晶速率介于缓慢与极快之间。液相中溶质部分混合。
由于溶质有部分对流混合于液相,界面推进任一瞬时溶质富集扩散边界层外
的液相中溶质浓度(CL)B>C0。
由于不平衡结晶时有溶质富集边界层存在,已不能利
用界面上的溶质平衡分配系数分析溶质分布,用有效分配
系数来分析。有效分配系数的定义为:
BL
iS
e C
C
k
)(
)(
即凝固某一瞬时界面固相浓度与边界层外液相浓度之比。
有效分配系数与平衡分配系数之间的关系可推导为:
D
Re
ekk
k
k
)1( 00
0
R-液固界面推进速率;δ-边界层厚度;D-溶质在边界层中的扩散系数。
则合金棒中溶质分布可表示为(不包括初始瞬态区):
1
0 )1( ek
eS L
Z
CkC
此式也完全适用于溶质在液相完全混合和完全不混合的情况:
在液相中完全混合时(缓慢结晶), δ=0,则 ke = k0 ,上式即变为
1
00
0)1( k
S L
Z
CkC
33
在液相中完全不混合时(极快结晶), D
R
e
→0,ke=1,则上式变为 CS=C0。
不同冷却条件造成的偏析程度比较:
对于有一定宏观长度的定向凝固合金棒,冷
却条件不同造成的偏析程度对比一般为:
平衡结晶<极快结晶<较快结晶<缓慢结晶
对于尺寸较小的晶粒,冷却条件不同造成的
偏析程度对比一般为:
平衡结晶<缓慢结晶<较快结晶<极快结晶
六、金属的提纯
由定向结晶结果可见,对于 k0<1 的合金,在一定结晶速率条件下,溶质总是
富集于后部,若溶质是杂质需要去除,可不断将金属棒定向结晶并不断去除后部,
则会使金属中杂质浓度不断下降,达到提纯效果。
区域熔炼:反复形成定向结晶可采用感应加热器套在金属棒上由一端开始加
热熔化,再以一定速率向金属棒另一端顺序移动加热器,使金属棒分区熔化并凝
固,造成溶质再分配的定向结晶效果并实现提纯。为达到有效提纯,对一根金属
棒的区域熔炼要反复多次。区域熔炼提纯不但在金属棒,在硅、锗等半导体材料
提纯中应用也较多。
§ 6-2 成分过冷
一、成分过冷的形成机制
结晶时液固界面存在动态过冷度
ΔTk。若界面前沿为正温度梯度,则
在一般情况下在液体内部便没有过
冷度。
然而,当液固界面存在溶质富集
层时,由于溶质浓度的变化,导致富
34
集层中液相开始结晶温度可能高于实际温度的现象,即形成成分过冷。
二、形成成分过冷的条件
若温度梯度不断增大,则成分过冷区减小。当温度梯度增大到与结晶温度分
布曲线相切时,成分过冷区缩小为零,则成分过冷消失。
推导出结晶温度 TL分布曲线为:
)
1
1(
0
0
0
D
RZ
AL e
k
k
mCTT
TA—纯溶剂组元熔点;C0—合金成分;R—液固界面推进速率;D—溶质在
边界层中的扩散系数;m—液相线斜率的绝对值(仅适用于 k0<1 时);k0—溶质
平衡分配系数;Z—液相中距液固界面距离。
而结晶温度分布曲线的斜率为: D
RZ
L e
D
R
k
k
mC
dZ
dT
0
0
0
1
用 G 表示液固界面前沿的温度梯度,若在 Z=0 处必须有 G<
dZ
dTL ,才能出
现成分过冷区。因此,形成成分过冷的条件可写成:
0
00 1
k
k
D
mC
R
G
其中等号表示的是临界条件,等式左边为外部条件,右边为内部条件。
三、影响成分过冷的因素
由上式可见,影响因素的变化若能够使等式左边越小或右边越大,则成分过
冷区越大,或成分过冷越明显。
1. 温度分布
显然,温度分布若使 G 越小,则成分过冷越明显。当 G 为负值时,过冷区
更大。
2.溶质富集程度
R 越大,溶质越来不及在液相混合,界面富集越严重,使成分过冷越明显。
D 越小,溶质越不易扩散出边界富集层,也使溶质富集严重,使成分过冷越
明显。
35
k0<1 时越小或 k0>1 时越大,液-固两相成分差越大,结晶排出溶质越多,
液易造成界面溶质富集层,使成分过冷越明显。
3.液相线斜率绝对值
m 越大,界面溶质富集层中形成的液相结晶温度变化越剧烈,结晶温度分布
曲线越上凹,使成分过冷区越明显。
4.合金成分
C0越大,在相图上越远离纯金属一端,结晶时两相平衡成分(CL)i和(CS)i差别
越大,越易有更多的溶质排出在界面形成富集层,使成分过冷区越明显。
四、成分过冷对晶粒生长形态的影响
设晶粒定向生长,随过冷度增大,晶粒生长形态不同,形成的组织有所区别。
在实际生产中,以后三种的冷却条件比较常见。
§ 6-3 合金铸锭的组织
一、铸件的一般组织
铸件宏观组织一般由表层细晶区、柱状晶区和中心等轴
晶区三个晶区构成。
表层细晶区:表层激冷,造成较大过冷度,有极高形核
率,形成极细晶粒表层,晶粒位向随机。由于此层极薄,仅
约若干 mm,实用意义不大。
36
柱状晶区:由于表层细晶区形成后模壁温度升高,同时细晶区因结晶体积收
缩可能脱离模壁并在模壁之间出现气隙,降低热传导,使液相冷速减慢,热量由
细晶区向外传导使细晶区中某些位向与传导方向平行的晶粒沿热传导反向生长,
形成与模壁表面垂直的柱状晶区。
等轴晶区:在柱状晶区生长过程中,中部液相温度下降至熔点以下,或柱状
晶液固界面前液相区内形成成分过冷,而液面形成的固相颗粒沉入液相或柱状树
枝轴断裂卷入液相均可成为结晶核心,则在中部区域形成等轴晶区。
二、影响三晶区比例的因素
表层等轴晶区很薄,结晶状态对其影响不大,一般不考虑。一般希望铸锭有
较高比例的等轴晶区,且晶粒越细越好。柱状晶比较粗大,性能有方向性,变形
易开裂。
浇注温度:浇注温度越高,铸锭中部液相温度降到熔点以下时间越长,即相
当于使柱状晶区生长时间越长,同时正温度梯度越大,柱状晶界面出现成分过冷
越小。结果使得柱状晶区比例增大。
铸模冷却能力:铸模冷却能力在不同条件下可能有不同结果,要具体分析。
例如,当铸模冷却能力较大时,一方面柱状晶生长较快可以形成较大成分过冷易
导致等轴晶区形成,但另一方面柱状晶生长较快本身增大了柱状晶区比例,两方
面造成的结果相反, 终结果应视温度梯度、溶质分布及铸锭尺寸而定。如当铸
件尺寸较小时,较快的柱状晶区生长甚至使等轴晶区来不及形成便结晶结束,铸
锭出现柱状晶的穿晶组织。
化学成分:纯金属无成分过冷,出现发达柱状晶区的可能性较大。溶质浓度
较高及结晶温度区间较宽的合金(液、固成分差别大),出现强成分过冷的可能
性大,则柱状晶区比例较小。
溶液的流动状态:强的液体流动(振动、搅拌等),可促进模壁细晶脱落和
柱状晶破断形成等轴晶核,使等轴晶区比例增大同时细化晶粒。
三、铸锭组织的控制
在第二章已介绍过部分内容,自学。
37
§ 6-4 铸锭组织的缺陷
一、偏析
1.宏观偏析(区域偏析)
正偏析(正常偏析):如 k0<1 的合金先凝固的外层溶质浓度低于后凝固的内
层。这是由于柱状晶区生长时正常的溶质分配形成的宏观偏析。
反偏析(负偏析,反常偏析):与正偏析情况相反。一般认为是凝固收缩较
大的金属柱状晶侧向收缩产生空隙,使溶质浓度较高的液相倒流入先结晶的外层
区域所致。
比重偏析:若固相比重与液相相差较大,则先结晶的固相易沉入铸锭下部或
上浮于铸锭上部,因先结晶固相和液相成分不同而导致宏观偏析。
2. 显微偏析
主要指枝晶偏析和胞状偏析。
3. 其它缺陷
缩孔与疏松。夹杂与气孔。
38
第七章 金属的塑性变形
引言
金属受力 → 变形 = 弹性形变 + 塑性形变
外力撤除 → 弹性形变自动消除;塑性形变永久残留
本章重点讨论塑性变形,因为:
(1) 塑性变形是使金属成型的主要技术,如锻、轧、挤压、拉拔等。机
械加工中也伴随有塑性变形。
(2) 部件成型后不允许再产生塑性变形,如热处理变形易使部件报废。
(3) 部件服役时,不允许发生塑性变形,避免事故或部件断裂。
因此,探讨金属塑性变形的理论及实际意义为:
(1) 揭露金属的塑性变形和强度之间的关系与本质,将微观组织与宏观力
学性能联系起来。
(2) 探索强化金属材料的机理,并由此探索强化金属材料的方法及途径。
(3) 提供有关变形问题的理论依据,以改进实际生产工艺和质量。
塑性变形的分类:
冷塑变:变形温度低于再结晶温度的塑性变形,也称冷加工。
热塑变:变形温度高于再结晶温度的塑性变形,也称热加工。
本章先重点学习冷塑变的基本规律,再简单介绍热塑变。
工程应力-应变曲线:
以退火低碳钢为例。工程应力-应变曲线如图所示。
oe 段:σ<σe,弹性变形阶段,符合 Hook 定律
σ=Eε 或 τ=Gγ
其中 σ、τ为正应力及切应力;ε、γ为正应变及切应变; E、G 为弹性模量。
σe称为弹性极限,表示金属抵抗弹性变形的能力。
39
es 段:σe≤σ<σs,屈服阶段,由弹变向
塑变过渡,出现微量塑变,此时塑变仅在试
样中局部“软点”发生,尚未整体发生塑变。
σs称为屈服极限(工业中常用 σ0.2),表
示金属抵抗微量塑性变形的能力。
sb 段:σs≤σ<σb,均匀塑变阶段,试样
整体发生均匀塑变。
σb称为抗拉强度,表示金属抵抗均匀塑
性变形的能力。
bf 段:σb≤σ,缩颈阶段,试样局部发
生强烈塑变,出现“缩颈”。
σk称为断裂强度,表示金属抵抗局部强
烈塑性变形的能力。
材料强度指标:σe, σs (σ0.2), σb, σf。常用 σs (σ0.2), σb。
塑性指标:
延伸率 %100
0
0
l
ll f
断面收缩率 %100
0
0
F
FF f
δ,φ 均能够表示金属发生塑性变形的能力。前者表示均匀变形能力,后者
表示局部变形的能力。无论强度或塑性指标,均与微观组织特征及状态有关。
§ 7-1 单晶体的塑性变形
七、弹性变形
1.宏观规律
在工程应力-应变曲线中的 oe 段,σ与 ε成线性关系
σ=Eε 或 τ=Gγ
即应力应变之间的关系可以用常数 E 或 G 联系起来。而 E、G 之间的关系
40
为
)1(2
E
G
ν称泊松比,对于低碳钢在 0.3~0.5 之间
2.微观规律
弹性变形反映了内部原子结合力,E 或 G 表征了原子结合力的大小。
由双原子模型:在 A, B 位置两原子处于平衡状态,
相距为 a,原子之间合力 f=0。
当金属受力不大时,若迫使 B 原子靠近 A,则受斥
力;若迫使 B 原子远离 A,则受引力;使金属发生弹性
变形。当外力去除后,B 可自动回到原平衡位置,弹性
变形消失。由于上述原理偏离平衡位置不远,故受力与
应变之间近似为线性关系。
当外力较大使原子位移较大时,应力应变偏离线性关系,Hook 定律失效,
或原子无法自动回位,即发生塑性变形。
显然,原子结合力越强,E(G)越大,即需要加大应力才能发生同等量的应
变。可见,宏观物理量 E 或 G 可以反映微观的原子结合力。
因此,凡是能够提高原子结合力的过程,均可以提高材料的弹性模量,进而
提高金属强度,如改变合金成分等。热处理对 E 基本无影响。
八、塑性变形
1. 宏观表现
物体的外形及尺寸均发生了永久性变化,而体积基本不变。应力应变为非线
性关系。
随塑变量增加,金属强度上升而塑性下降。
2.微观表现
晶粒形状沿外力方向拉
长(或沿压缩方向变扁)。
41
随拉伸载荷增加,组织演变过程为:等轴晶粒→拉长晶粒→纤维状组织
随压缩载荷增加,组织演变过程为:等轴晶粒→盘状晶粒→纤维状组织(横
截面)
晶内结构:位错密度增加,亚晶增多并细化。
原子排列状态:原子位移偏离平衡位置并且不能恢复平衡位置,造成晶格畸
变。
晶体变形方式及过程:滑移,孪生,扭折。
九、滑移
滑移:晶体的两部分原子沿特定晶面及特定晶向相对滑动了一个或多个原子
间距的过程。滑移是金属塑性变形的 基本过程或 主要方式。
1. 现象
单晶体表面抛光后施加载荷发生塑性变形后,显微镜下可观察到台阶状痕
迹,这些台阶痕迹称为滑移线,多条聚集的滑移线
称滑移带。
特点:
(1) 平行滑移线之间距离有多个原子间距;
(2) 形成滑移线的台阶高度不一致;
(3) 滑移带之间晶体未发生塑性变形。
可见:
(1) 不是所有指数的晶面都能够发生滑移;
(2) 发生滑移的晶面,相互平行的同一组晶面中也不是所有晶面都能够发
生滑移。
(3) 即使发生滑移的晶面,产生的滑移量也不相同。
结论:在晶体中各晶面的滑移是不均匀的,或滑移容易集中在某些晶面上。
2.滑移晶体学
滑移面:晶体中能够发生滑移的特定晶面。
滑移方向:在滑移面上晶体发生滑移的特定晶向。
滑移系:每个滑移面和滑移面上的一个滑移方向组成的滑移系统。
42
三种金属晶体结构的典型滑移系数目
bcc fcc hcp
滑移面 {110} {111} {0001}
滑移方向 <111> <110> <11 2 0>
滑移系数目 6×2=12 4×3=12 1×3=3
一般情况下,晶体的滑移线越多,则受力时可提供滑移的场所、位向越多,
滑移条件越充分,金属的塑性越高。
说明:
(1)滑移总是优先沿原子 密排面和 密排方向进行。
原因:原子运动总是优先取能量 低方式。 密排面面间距 大,原子迁移
到另一平衡位置越过的势垒 小; 密排方向上点阵
常数 小,原子迁移到另一平衡位置的距离 短。
(2)无论晶体受外力方式如何,引起晶体滑移的
总是作用在滑移面上下两部分原子并与滑移方向相同
的切应力。此切应力是外力的分力。
(3)滑移后,原子处于新的平衡位置,晶体结构
不变,内部无滑移痕迹。
(4) 一般情况下,以 fcc 金属塑性 好,bcc 金属次之,hcp 金属塑性 低。
原因:hcp 滑移系 少,故塑性较低。Fcc 虽与 bcc 滑移系数量相同,
但滑移
方向较多,更容易使外力在某个滑移方向上形成较大分力而造成滑移。
5)在某些受力条件下,金属的滑移系不局限于典型滑移系,其数量可增
多。
原子面密度接近{110},有时也可能参与滑移; c/a<1.633 的情况下,hcp 的
{10
(
例如:在高温时,fcc 的铝可增加{100}滑移面;在 bcc 金属中, {112}和{123}
1 0}、{10 1 1}和{10 1 2}的原子面密度接近{0001},也可能参与滑移。
大变形条件下,也容易引起滑移面增多。
哪个滑移系首先启动的可能性
便越大。
另外,在低温、较快、较
3.滑移的临界分切应力
在外力作用下,哪个滑移系所受的分力越大,
43
单晶体拉伸模型:
试样横截面积为 A,滑移面横截面积为 A’, SO
及 角)。 T 均处于滑移面上(与 NO 成直O
cos
'
A
A其中
作用在滑移面上的分力为 sinP
S
P
O
作用在滑移面上的切应力为 sincos
' AASO
PP
SO
切应力
SO
在滑移方向 上的分量称滑移面上的分切应力 τ,即 TO
cossincoscos
P
为简化表达分切应力的概念,设外力方向与滑移方向的夹角为
ASOTO
λ,则上式也
可写成:
sco
A
P
cos
试样横截面上的正应力
A
P
,
设 m=cosφsinφcosθ=cosφcosλ,称 取向因子,也称 Schmid 因子,则
s
则滑移方向上的分切应力即为滑移启动的临界分切应力 τk:
k s
τ≥τk
(1)
m 为
τ=σm
当晶体开始塑性变形时,即应力应达到屈服极限,有 σ=σ,
τ =σ m
即滑移面启动滑移的临界条件必定是:
讨论:
当 θ一定且 θ≠90º,根据 m cossincos ,按求极值方法可得:
当φ=45º 时,m 达到 大,使 τ 大,即滑移面上有 大分切应力,
易
引起滑移;
当φ=0 或 90º 时,m=0,使 τ=0,滑移面上无分切应力,不能滑移。
可见,m 越大的晶体取向容易在外力作用下发生滑移,产生塑性变形。
44
因此,称 m 较大的晶体取向为软取向,称 m 较小的晶体取
向为硬取向。
(2)τk 是定值。因在单晶体中,σs 与 m 为变量,两者之间
为双曲线关系,相乘后即为常数。
(3)显然,单晶体的 τk越高,越不易发生滑移。τk是衡量单
晶体是否容易屈服的物理量,取决于晶体原子间结合力,不同金属的
同,原子结合力则不同,
弹性模量不
τk相应不同。同一金属晶体的各向异性使不同滑移系的
弹性 同滑移系有不同的 τk。金属中典型滑移
系的
实现持
续滑
动,即使得φ→90º。
势是使滑移系转
动至
压缩时的转动方向相反,滑移面向外力轴垂直方向转动。
若晶体起始φ>45º 时,滑移启动后晶面转动使 m 逐渐减小,使
化。
硬取向的滑移系转动到软取向后启动,
于是
模量不同,也会造成不
τk均低于其它非典型滑移系的 τk。
4.滑移时晶体的转动
因外力轴线不变,晶面相对滑动时,必须伴随转动才能
移。其转动规律为:
滑移方向力图向 大切应力方向转动,即使得 θ→0;
滑移面法线方向力图向外力垂直方向转
此转动过程使得在滑移时晶体取向因子 m 不断变化。发展趋
与外力轴相平行的方向,使 m→0。
几何软化:若晶体起始φ<45º 时,滑移启动后晶面转动使 m 逐渐增大,使
得 τ上升,有利于滑移,称几何软化。
几何硬化:
得 τ下降,不利于滑移,称几何硬
5. 多滑移
两个或多个滑移面同时或交替启动,沿不同
滑移方向进行的滑移。也称多系滑移或复滑移。
原因:受力时,处于 软取向的一组滑移系
首先启动,晶体转动使晶体取向变化,可使另一
组原处于
使滑移可在两组或多组滑移系中同时或交替
进行。
45
形态特征:发生多滑移的晶体表面会出现交叉状滑移线。
向进行的滑移。
由螺型位错产生(多滑
移刃、螺位错均可产生)。
τ需要克服位移原子受下层原子的作用力的变化为:
抵消,τ=0;
因此,根据 τ为 x 周期函数的性质,可写出两者之间存在的函数关系为:
6.交滑移
两个或多个滑移面同时或交替启动,沿同一滑移方
hcp 的两个滑移系同时启动产生交滑移示意图。
形态特征:发生交滑移的晶体表面会出现曲折或
注意与多滑移的区别:滑移沿不同滑移方向;晶
体表面滑移线为曲折状;只能
波纹状滑移线。
十、滑移的位错机制
1.滑移的理论切应力
设滑移面上层原子在 τ作用下位移了 x 距离,则
当 x=0 时,变形未进行,τ=0;
当 x=b 时,原子位移了一个周期,τ=0;
当 x=b/2 时,位移原子受下层左、右原子的作用力相互
当 x=b/4 时,位移原子受下层原子引力 大,τ=τm;
)sin(
bm
2 x
设位移量 x 较小,同时处于弹性变形阶段而满足 Hook 定律,则有
b
x
m
2
以及
a
x
GG
∴
axm
bGb
22
当晶体为立方系时,a=b,则上式变为:
2m (修正后为
G
30m )
τm 为原子位移必须克服的 大切应力,即外加切应力
G
τ 必须达到 τ≥τm 的条
件时
为材料切变模量,为常数,因此对于已知弹性模量的金属,即可得知其 τm
值。
,才能造成滑移。因此称 τm为临界理论分切应力。
G
46
2.滑移的位错模型
上述理论计算出的临界分切应力值与实际测定的临界分切应力相差很大,如
下表:
切变模 MPa) τm( 测定 a) 量 G( MPa) τk(MP
Al (fcc) 24400 3830 0.786
αFe (bcc) ~68950 ~10960 2.750
Cu (fcc) 25000 3980 0.49
Mg (hcp) 16400 2630 0.393
显然,理论分析与实际不符。即原子在滑移面上的刚性滑移模型不正确。
34 年,提出刃型位错几何图像,并用于解释晶体中的滑移(G. L. Taylor
等)
);
观察,满意地解释了位错与金属塑性变形
之间的关系,获得了突破性的成就。
在切应力作用下滑移面上下两部分原子的错动是位错逐步滑移的 终结果。
1928 年,提出位错概念;
19
;
1938 年,在理论上计算了位错运动速度(Franker
1939 年,提出螺型位错及柏氏矢量(Burgers);
1947 年,提出位错应力场与其它畸变应力场之间的交互作用;
1950 年,在显微镜中观测到螺型位错源生长晶体表面的形态;
1956 年,电子显微镜的发展与应用大大推动了位错的研究工作,对于晶体受
力位错发生滑移的运动形态进行了直观
滑移的位错机制:
47
位错滑移规律概括:
位错的运动是由一个平衡位置移动到另一平衡位置的过程,运动过程仅牵涉
一列原子键的破坏,并非刚性滑移的必须晶面上所有原子键同时被破坏,因此所
需切
b 垂直;异号位错线
运动
的变形台阶;n 个位错
移出
而不能发生滑移,因此滑移量在各晶面是不均匀的或滑移线
分布
其可动性大于刃
型位错,即可发生交滑移,如图所示的 fcc 晶体的双交滑移。
应力要小得多。
刃型位错线运动方向与 b 平行,螺型位错线运动方向与
方向相反;晶体运动方向均与 b 平行。
位错线在切应力作用下滑动出晶体表面后形成一个 b
晶体表面后形成 n 个 b 高度的台阶,成为滑移线。
可动位错数目较多的晶面才有可能发生滑移或形成滑移台阶,无位错的晶面
滑移所需切应力极大
是不均匀的。
因螺型位错的与位错线平行,故在滑移过程中转移滑移面,
际变形情况相符。而刚性滑移模型则无变形速率限制,与实际变形情
况不
置建立新的原子键平衡,这个过程相当于需要克服点阵阻力(或点
阵摩
假设: 子相互作
质。
因位错运动是逐步进行的,因此实际晶体变形速率不可能很大(不超过声
速),与实
符。
3.位错运动的点阵阻力
位错从一位置运动到另一位置需要克服能量势垒,或者需要破坏原子键的平
衡而在另一位
擦力)。
假设运动位错为简单正方晶体中的刃型位错;滑移面上下原
用切应力为原子相对位移的正弦函数;晶体为连续介
48
则经推导得出单位长度位错滑移所需克服的点阵阻力为:
b
a
p 1
G 为切
e
G )1(
2
2
变模量;ν 为泊松比;a 为滑移面间距;b=|b|,即为滑移方向上的原
子间
-纳力(P-N)力。
取 ν=0.3(一般低碳钢),
则 τ
及 密排晶向的 τp 小,符合滑移系由 密排晶面和 密
排晶 的情
距。
τp也称派
讨论:
若 τ≥τp,位错克服点阵阻力可以滑移,塑变开始。若
p,≈10-3~10-4G,数值即与实测 τk为同一数量级。
原子面密度越大的晶面,晶面间距 a 越大;原子越密排的晶向,原子间距 b
越小。因此 密排晶面
向构成 况。
式中的
1
称位错宽度,标志位错两侧晶格畸变衰减速率,位错宽度越 ,
位错两侧晶格畸变衰减越慢,τp 值越小,位错越易滑移。fc
a
大
c 的位错宽度比 bcc
大,因此塑性较好。化合物的位错宽度极小,因此硬脆。
需切应力条件
外,
动。可通
过能
错线滑移了 ds 距离,部分晶体位移了 b,
则位
作用在位错线上的力为 F,则 dW 也就相当于 F 使位错移动 ds 距离所做的
功:
·ds
l·ds·b
4.作用于位错线上的力
除从位错滑移阻力角度分析滑移所
还可以从位错本身受力来分析。
使物体滑移,归根结底是物体本身受了力,若是
位错滑移,则在假设位错是物理线,作用在晶体上的
切应力 τ传到了位错线上,是位错发生了滑
量平衡方法近似计算位错所受的力。
设与 b 平行的切应力 τ使长为 dl 的位
错滑移增加的面积: dA=dl·ds
切应力所做的功为:dW=(τ·dA)b=τ·dl·ds·b
设
dW=F
所以 F·ds=τ·d
49
即 F=τb·dl
则作用于单位长度位错线上的力为: f=F/dl=τ·b
当 τ=τk,滑移系启动,也即位错运动,位错所受的力为: fk=τk·b
当 τ≥τk,则 f≥fk,位错能够发生滑移,fk 可称为位错滑移的临界推动力。
的各点的法矢量方向,指向未滑移区。
移
出的
:一般变形过程中,位错可源源不断形成,变形越大,晶体中位错
密度
在位错源,有多种
情况和位错源机制。
B 两点由于位错线垂直与滑移面而
被钉扎。位错线各点法向受力以相同速率滑移。
结果:形成位错源,不断放出位错环。
f 的方向为位错线
5.位错的增殖
问题:(1)一根位错线移出晶体仅产生一个 b 的变形台阶,一条滑移线需要
千千万万根位错线的变形台阶组成,而晶体宏观塑性变形量又由无数条滑移线和
滑移带构成,晶体中这么多位错从何而来?(2)是否变形越大,由于金属中
位错越多而其中剩余的位错越少?极限情况是晶体中 终无滑移位错?
实际情况
越大。
这是由于晶体中往往存
现仅以 Frank-Read 源机制
为例:
设在滑移面上有 l 长的位错线 AB 受力滑
动,在 A、
使 F-R 源开动的应力讨论如下:
位错线 AB 在 τ作用下弯曲,线张力(弧长为 2θR)与位
错受 θR) 力平衡时有: 2Tsinθ=f·(2
50
当 θ较小时,上式简化为:2T·θ=f·(2θR)
2/2 位错线张力约为: T=Gb
位错线受力为: f=τ·b
故有:
R2
曲率半径 R 越小,使位错弯曲的 τ越大,
Gb
位错弯曲程度越大,R 越小。
当 R=l/2 时,R 为 小值,此时 τ 值即应为能够使 F-R 源开动所需的 小切
应力,称为 RF- 源开动的临界切应力 τc,即
l
Gb
c
仅当 τ≥τc 时,F-R 源才能不断生成新的位错。实验证明,τc与晶体屈服强度
较接近。
仅当滑移面上存在易于开动的位错源时,此滑移面才能产生较大变形量,这
是滑移变形不是均匀地分布在每个滑移面上的主要原因。
测,是宏观参量 σs与微观参量 m 的结合。
τm=G/2π。理论分切应力,适用于原子面刚性滑移模型,不符合实际位错滑
移模型。
关于几个临界切应力的总结:
τk=σsm。滑移面滑移的临界分切应力,适用于单晶体模型,引入了滑移系概
念,能够实
b
a
G
2
2
p 1
得出,可
e )1( 。位错运动点阵阻力,由位错运动所需克服的点阵阻力角度
以用位错滑移机制满意地解释晶体塑性变形的一般规律。
件。
是对于一般晶体而言,在某些特殊条件下,如界面间距虽变形减小
到一 界面吸收,晶内位错密度反而下降
τc=Gb/l。F-R 位错源开动的临界切应力,可以说明塑性变形会使位错增殖的
机制。
fk=τk·b。位错运动的临界推动力,从位错受力角度表征了滑移的位错运动条
上述各参量均为临界值,物理含义、分析问题的角度及适用场合有所区别。
上述理论
定程度后,可使晶内位错亚结构失稳而被
51
甚至
消外,可相互交割。刃-刃,
刃- 之间的交割结果各有不同,通过产生割阶、扭折和相互钉扎
等方式相互阻碍,提高滑移能量,使滑移困难。
位错才能发生攀移;(2)存在原子扩散,需要热激活,比
滑移所需能量大,低温下难以实现;(3)物质数量发生变化,称“非守恒运动”,
滑移则为守恒运动。
消失。
举例:纳米纤维复合强化 Cu-Ag 合金。
6.位错的交割
位错在滑移过程中可相遇,除异号位错相互抵
螺,螺-螺位错
7.位错的攀移
攀移:刃位错垂直于滑移面的运动。
原子的运动方式:正攀移是半原子面下部失去一列原子,或一列空位迁移至
半原子面下部。负攀移的原子运动恰相反。
说明:(1)仅刃型
十一、 孪生
体的两部分原子沿特定晶面均匀切变,形成镜面对称位向关系的过
程。
移系
方式 于孪生特征晶体位向促进滑移变形。
孪生:晶
1.现象
某些金属在低温、变形速率较快、滑移系较少或滑
处于硬取向的不利于滑移条件下,可借助于孪生
变形,或借助
组织形态:孪生形成孪晶,有透镜状和条状两种。
52
2.形成机理
,晶体中一部
分原 切
若每层(111)晶面原子沿[11
在切应力作用下
子面沿一定晶向发生均匀
变并形成镜面对称关系。
以 fcc 为例:
2 ]
晶向均相对于相邻层原子发生 a/3 的切变位移,则三层原子便会产生一个原子间
距的切变,其结果形成晶面对称关系。此切变过程即为孪生。
匀切变带便为孪晶。实际上是 211
6
a
多层原子的均 不全位错在孪生面上运动
结果。
移的区别
括如下:
的
3.与滑
概
滑移 孪生
变形方式 位错运动 变 原子面切
机制 全位错滑移 错滑移 不全位
晶体位向 不变 镜面对称取向
晶体运动晶面 滑移面 孪生面
产生一个原子间距变形量需要晶
面数
一个 多个
发生变形的每个晶面变形量 匀 不均 均匀
显微组织特征 拉长晶粒 孪晶
53
变形所需应力 小 大
引起的塑性变形量 大 小
作用 塑变主要方式 塑变辅助方式
六、扭折
有些单晶体在某些条件下的滑移和孪生变形均不易进行时,有时可能
折。
发生扭
例如,对于 hcp 单晶体,若外力平行于(0001),则滑移面上切应力 τ
=0(因取向因子 m=0),滑移无法进行,若孪生也无法进行,则会出
现扭
集中所引起的晶格弯扭。
孪晶。
够发生。
易滑移 τk 时,软取向的一
个滑移系启动,位错运动所受阻碍因素少,应力稍有
增加
折。
扭折出现的形变区称扭折带,其本质是滑移面上的位错在局部地区
扭折带的形态:类似弯曲的
作用:特征晶体取向,使滑移和孪生能
七、单晶体应力应变曲线
与多晶体的工程应力应变曲线不同。
曲线一般分三个阶段:
阶段:初始变形当 τ≥
即可引起较大应变,应变硬化不明显,或硬化系
数
d
(曲线斜率)较低。
线
d
性硬化阶段:τ 持续增加使 γ 达到一定程度后,由于滑移系的转动发生多
滑移,位错在几组滑移面上运动,相互缠结、交割或阻碍,使得
迅速增
大。
d
d
抛物线型硬化阶段:一些螺型位错位错滑移被阻碍后则通过交滑移至另一滑
54
移面继续滑移,使得滑移重新变得容易,故
d
d
反而又有所降低。
不同晶体结构的单晶 每阶段的
d
d
体应力应变曲线三个阶段范围及 值不
同。
§ 7-2 多晶体的塑性变形
启动,而相邻晶粒尚未开始滑移,则位错便会受晶界阻
碍而
同号
界协调这种切变。
量:εxx, εyy, εzz;三个切应变分量:εxy, εyz, εzx;一个变形时体积不变
的限 εyy+ εzz=0)。
力较低。
一、晶界在塑性变形中的作用
与单晶体塑变相比,多晶体由许多小单晶体组成,其
作用。
塑变应考虑晶界因素的
1.位错塞积
外载荷施加在多晶体上,某软取向的晶粒内位错源
在晶界处形成塞积。
随塞积位错密度的增大,塞积应力对位错源放出的
位错排斥作用增强,使位错源开动越来越困难,即增大了继续滑移阻力。
2.协调变形
塞积应力可通过晶界作用到相邻晶粒的滑移系上,与分切应力叠加,造成相
邻较硬取向晶粒中的滑移系启动,两个晶粒相互协调进行塑性变形。
晶粒变形时,滑移系转动,相当与晶粒位向转动,相邻晶粒位向转动方向不
同,在晶界附近产生切变,依靠晶
各晶粒同时发生变形构成多晶体的变形,为使各晶粒协调变形,需要每个晶
粒中至少同时有五个滑移系开动才能满足五个独立应变分量协调变形的条件(三
个正应变分
定条件:εxx+
可见,滑移系较多的多晶体如 fcc 及 bcc,容易满足晶粒之间协调变形的自
由度要求,因而具有好的塑性变形能力。而滑移系较少的多晶体如 hcp,塑变能
55
3.细晶强化
金属晶粒越细,晶界面积越多,晶界阻碍位错滑移作用越大,越不易塑性变
形,使屈服强度升高。用 Hall-Patch 公式表达晶粒平均直径 d 与 σs的关系为:
2
1
Kd
注意:单晶体中 σ=τ /m,σ 是变量,取决于取向因子 m,而多晶体中因每
个晶粒的取向因子都不同,综合效应是各向同性,不存在固定 m,当晶粒尺寸确
定时,σ 为常数。
另一方面,较细的晶粒可使应变分布比较均匀,较多的晶界使晶粒之间变形
协调能力增强,晶内的位错塞积造成的晶界局部应力集中程度低,
0s
s k s
s
也有较多的晶
粒分担塑性变形,
即细晶会造
成强韧化效应。因此,实际生产中往往采用不同方法细化晶粒。已学过的有:变
质处理,增大过冷度,振动结晶,重结晶等。
然各晶粒之间的转动要互相制约,互相协调,过程
比较复杂,
致。
体学特征。也称择优取向。
缩变形形成的变形织构方向与外力轴向垂直,称板织构。
称退火织构。
应于纤维组织概念
或在每个晶粒应变相同的情况下,较多晶粒累积的宏观塑性变
形量较大。因此,细晶不但能产生强化效果,也同时会使塑性提高,
在高温条件下,晶界原子活动能力较强,容易发生粘滞滑动或应变集中于晶
界,导致沿晶开裂,故细晶强化不适用于高温。
二、变形织构
多晶体中每个晶粒塑性变形时均发生滑移系的转动,类似于单晶体,滑移面
均向与外力平行方向转动。虽
在时间和空间上不连续,但在强烈变形条件下, 终位向会趋向于一
变形织构:在经受较大变形后,大部分晶粒优先沿某晶向近似平行排列的晶
因各晶粒位向相近,故多晶体也出现各向异性,使金属在织构方向上增强。
拉拔变形形成的变形织构方向与外力轴向平行,称丝织构;
压
除强烈变形外,有些金属在退火过程中会造成晶粒的择优取向,
注意:变形织构是一种晶体学特征,不是纤维组织特征,
区别开来。
56
三、位错亚结构
塑性变形使位错增殖,相互缠结在一起,在晶粒内部形成胞状亚结构,或称
“位错发团”,位错胞,形变亚晶。胞壁位错密度较高,胞内
位错 位向差,
胞壁即相当于一定厚度的亚晶界。
高,晶粒内部位错密度越高,位错胞的尺
寸越
称内应力,由于金属内部变形不均匀而残留的弹性应力。
起。
形功除大部分转变为热能外,
点阵畸变的形式贮存在晶体内部,形成第三类内应力,
降低,应设法消除。
升、塑性下降的现象。
错密度急剧增大,变形亚晶细化,由于
相互交割、钉扎、缠结及塞积,位错滑移受到强烈阻碍,
密度较低,胞与胞之间由位错胞壁分离,有较小
塑性变形程度越
小,胞壁也越厚。
位错亚结构仅能在透射电子显微镜下观察到。
四、残余应力
也
第一类内应力,即宏观内应力。由工件各部分之间变形不均匀引起,应力分
布处于工件整体范围。
第二类内应力,即微观内应力。由晶粒或亚晶粒尺度范围内的变形不均匀引
第三类内应力,即点阵畸变应力。由变形产生的大量位
引起。塑性变形过程中的变
错、空位等点阵缺陷
尚有一部分以形成大量
是一种热力学不稳定状态。
残余应力一般会使金属强度、塑性
当表面存在压应力时,可提高金属的疲劳强度,可通
过喷丸和表面滚压获得。
五、塑性变形对金属性能的影响
冷变形强化(加工硬化):随冷变形程度增大,金属
强度上
强化机制:
塑性变形使位
57
导致
理论分析表明,金属的屈服切应力 τs可以表示为位错密度 ρ的函数:
强度升高,塑性下降。
Gbs 0
式中 α≈0.3,G 为切变模量,b 为柏氏矢量的模。
不再
出现屈服现象;若卸载后放置一段时间或在 150~200℃
加热几小时后再拉伸,则又会出现屈服现象。
尺寸差越大,固溶强化作用越大;
变能,
。位错
若运动,必须首先摆脱溶质气团的钉扎,即阻碍了位错的运动,造成强化。
§ 7-3 合金的塑性变形
一、单相固溶体的塑变
与多晶体相比,由于含有溶质原子,其塑变应考虑溶质原子的作用。
1.屈服与应变时效
屈服现象:对低碳钢工程应力-应变曲线的屈服阶段进一步观察可发现:
屈服开始产生时,应力有所下降,随后保持一段恒定后再升高。
点。
当
出现了上下屈服
应变时效:已屈服试样卸载后立即重新拉伸,则
屈服和应变时效现象是溶质原子作用的结果。
2.固溶强化
合金加入溶质后产生使强度升高的强化效应。
溶质形成固溶强化的基本规律:
溶质浓度越高,固溶强化作用越大;
溶质与溶剂的原子
溶质与溶剂价电子差越大,固溶强化作用越大;
间隙溶质元素比置换溶质元素的固溶强化作用大。
3.固溶强化机制
溶质造成点阵畸变应力场,与位错应力场发生交互作用,为降低系统弹性应
在应力场作用下,溶质原子趋向与向位错线周围聚集,在位错线周围形成
溶质偏聚区,称为溶质“气团”(刃型位错周围的溶质气团称为柯氏气团)
58
除上述应力场弹性交互作用促使溶质偏聚区形成外,尚有化学交互作用和静
电交互作用等机制也促使溶质偏聚在位错线阻碍位错运动。
当拉伸时,位错必须挣脱溶质气团钉扎才能发生滑移,所需应力较高,一旦
挣脱气团开始运动,所需应力反而下降,因而金属出现有上、下屈服点现象。若
屈服后卸载马上拉伸,已经挣脱溶质气团束缚的位错周围来不及再形成新的溶质
气团,因此不会再出现屈服现象;若放置一段时间或低温退火,溶质有条件在已
脱钉的位错周围又重新偏聚,再次钉扎位错,因而又出现屈服,形成应变时效现
象。
1.固溶体第二相的强化
由于基体相和第二相均有良好塑性, 相互协调变形,相界作用类
似于晶
二、多相合金的塑变
与单相固溶体合金相比,由于组织中有第二相,其塑变应考虑相界的作用。
可以较好地
界作用,可按各相体积分数的叠加原则粗略考虑合金平均强度和塑性:
=f1σ1+f2σ2
=f1ε1+f2ε2
为合金的平均流变应力; 为平均应变;f1、f2 为两相体积分数;σ1、σ2、
ε1及 。
化合物的数量、形态和分布。
的细小颗粒形态分布时,可有效改善强度,不严重损害
韧性 和弥散强化。前者通过固溶+时效工艺获得均匀弥散的
第二
粒为硬脆化合物或间距较大时往往出现。
ε2分别为一定应变时两相的流变应力和应变
2.化合物第二相的强化
化合物往往硬脆,形成的第二相强化作用取决于
化合物的形态和分布对强化规律的影响:
脆性相以网状形态分布于晶界时,会使合金脆性增大。
脆性相以片层状分布于晶内时,可提高强度。
脆性相以均匀、弥散
。其中包括时效强化
相,后者通过粉末冶金或机械合金化获得均匀弥散的第二相分布。
3.第二相强化机制
(1)位错绕过机制
也称 Orowan 机制。当第二相颗
59
位错运动增加的能量:
绕过粒子时,位错线弯曲变长。
粒子周围留下了新的位错环。
位错环应力场对后续位错在绕过粒子时增加了
排斥
必须增加的切应力与粒子半径 r
力。
绕过机制使位错运动 的关系:
f
r1 f 为粒子体积分数;α
错运动阻力;
产生割阶;
若粒子为有序结构,为低能排列方式,位错切过后粒子后,
滑移面上原子位移一个间距,则滑移面上下原子变为高能排列方
子半径 r 的
关系
为常数。
可见,粒子越多,越细小,强化效果越大。
(2)位错切过机制
当第二相颗粒可塑性变形且间距较小时往往出现。
位错运动增加的能量:
增加了基体和粒子切变形成的新的相界面积;
化合物粒子中的 P-N 力较大,位错运动点阵阻力大;
粒子与基体点阵不同,位错切过粒子由于柏氏矢量的区别,要
移面上原子错排,增大位
引起粒子的滑
粒子中滑移系与基体滑移系不平行,位错进入粒子时会在界面上
式,即产生反向畴界。
切过机制使位错运动必须增加的切应力与粒
:
rf 2 f 为粒子体积分数;β为常数。
若某种第二相粒子既可切过也可绕过时,则根据粒子半
径 r 的变化,切过和绕过时切应力增量综合效应如图所示:
当 r<rc时,Δτ2较低,以切过机制为主;
当 r>rc时,Δτ1较低,以绕过机制为主;
当 r=rc 时,达到两种机制过渡的临界状态,此时位错
通过粒子所需增加的切应力 大,这种第二相颗粒尺寸分布强化效果 好。
60
第八章 回复、再结晶和金属热加工
§ 8-1 变形金属加热时的变化
冷变形使金属内部缺陷密度升高,变形贮存能增大,处于热力学不稳定状态。
当提供外界能量如加热时,原子被热激活,相当于提供了组织释放贮存能的动力
学条件。
一、显微组织变化
冷变形组织在加热过程或直接加热到较高温度(如 T=0.5Tm)的保温过程中,
显微组织会发生回复→再结晶→晶粒长大三个阶段的变化。现象如图所示。
仅是显微组织形态的变化,不存在相变。
二、性能变化
回复阶段:力学性能几乎不变。电阻率及内
应力下降比较明显。
再结晶阶段:强度、硬度明显下降,塑性明
显上升,加工硬化效果基本消失。电阻率及内应
力下降也比回复时明显,密度显著升高。
晶粒长大阶段:强度、硬度下降趋势变缓;
61
塑性稍有升高或保持不变,若晶粒粗化严重还会使塑性下降。电阻率及密度基本
不变或稍有升高。
变形贮存能在回复阶段有所释放,主要在再结晶阶段才能得到有效释放。
§ 8-2 回复
回复:冷变形金属加热时,在光学显微组织发生改变前的微观结构变化过程。
根据回复过程显微结构变化规律,可以分为低温、中温和高温回复三个过程。
一、低温回复
处于回复阶段的较低温度范围。原子活动能力有限,仅能点缺陷运动。
主要表现:过饱和的空位可通过迁移至晶界、与间隙原子结合及聚集成片位
错环等线缺陷的方式减小过饱和度。
二、中温回复
处于回复阶段的中等温度范围。原子活动能力有所增强,线缺陷可以发生滑
移运动。
主要表现:在内应力或位错应力场作用下,同一滑移面上的异号位错相互吸
引滑移相遇后相互抵消,使得位错密度略有下降,位错胞壁有所变薄,缠结的位
错变得平直或规则。
三、高温回复
处于回复阶段的较高温度范围。原子活动能力进一步加强,线缺陷可以发生
攀移运动。
主要表现:多边化。
多边化:冷变形金属在高
温回复温度退火时通过刃型
位错的攀移和滑移,使同号
位错沿垂直于滑移面的方向排列成小角度晶界的过程。
62
刃型位错这种相互垂直排列的弹性应力场可相互抵消一部分,使系统应变能
降低。
这种方式排列的亚晶界也称“位错墙”或“位错网络”(TEM 下观察)。
注意与形变亚晶(位错发团)的区别:实际是形变亚晶在高温回复阶段位错
排列的整齐化结果,胞壁变薄,胞内位错密度更低。
四、去应力退火
在回复阶段,由于位错密度没有本质性下降,显微组织变化不大,因此对强
度、塑性影响不大。由于空位减少和位错规则排列使应变能下降,因而内应力和
电阻率降低。
去应力退火:为部分消除内应力并同时保持冷变形强化效果,可将冷变形金
属在高温回复温度退火,称去应力退火。
§ 8-3 再结晶
再结晶:冷变形金属加热时,通过新的、无畸变晶粒的形成而取代变形晶粒
的过程。
一、形核与长大
在塑变过程中积累的变形
贮存能可在再结晶过程中得
到释放,通常在能量较高的区
域优先形成再结晶核心,进行
显微组织重新改组。根据变形
程度不同,有几种形核机制。
1.晶界弓出形核
条件:冷塑变程度较小(如
小于 20%)。
由于变形量较小,各晶粒中的变形不均匀,优先发生滑移的软取向晶粒变形
63
较大,其中位错密度较高,亚结构较细小,能量高于相邻变形量较小的晶粒,处
于不稳定状态。在再结晶温度下,为降低系统能量,稳定晶粒中的部分与大角度
晶界重合的亚晶界会向变形量大的晶粒中推移,吞食其中的细小亚晶粒,原亚晶
界的位错不断向弓出晶界转移,形成无畸变的再结晶核心。
符合晶界弓出的能量条件:
设 A, B 两晶粒单位体积贮存能量差为∆E,晶界表面能为 σ,晶界弓出弦长
为 2L,则经推导,当符合下列条件的晶界才可能发生弓出形核:
L
E
2
可见,必须至少存在产生上述条件变形量的金属才能发生再结晶,即当变形
量很小时,可能没有任何一处晶界两边的晶粒符合上述条件,再结晶便不能发生。
2.亚晶形核
条件:冷变形量较大。
此时各晶粒变形较均匀,即大角晶界两边晶粒贮存能量相差不大,不存在足
够大的∆E 而使晶界弓出形核,必须依靠晶粒内部的亚晶粒本身形成再结晶核心。
(1) 亚晶合并
某些亚晶通过位向旋转、亚晶界消失等方式实现合并形成再结晶核心。亚晶
界的消失实际上是由于位错网络的解离及位错的滑移和攀移而转移到周围亚晶
界上实现的。由于合并后亚晶界位错密度的增加,亚晶位向差不断增大至一定程
度后失稳而演变为大角晶界,成为无畸变的再结晶核心。
高层错能金属亚晶界中的位错容易通过攀移运动转移到周围亚晶界,故再结
晶通常以亚晶合并方式形核。
(2) 亚晶生长
64
有些本身位错密度较高的亚晶界两侧位向差边较大,容易失稳演变成大角度
晶界成为再结晶核心。
低层错能金属由于位错不易通过攀移运动转移到周围亚晶界,故再结晶通常
以亚晶生长方式形核。
二、再结晶温度
1. 理论再结晶温度
冷变形金属能够发生再结晶的 低温度,或能够使再结晶形核的温度。
无实际意义,因为无法检测到何处出现第一个再结晶晶粒。
2.实际再结晶温度
冷变形变形量大于 70%的金属经 1 小时退火能完成 95%以上再结晶的退火
温度。
除特别指明外,一般情况下提及的再结晶温度均指实际再结晶温度。
3.估算再结晶温度
较强冷变形退火 1 小时的工业纯金属可根据其熔点估算再结晶温度:
T 再≈(0.35~0.40)Tm (K)
三、影响再结晶的因素
再结晶温度受许多因素影响,可在一定范围内变化。
1.温度与时间
温度越高,完成再结晶的时间越短。
再结晶速率随时间变化为慢-快-慢。
设再结晶速率符合反应动力学方程:
RT
QR
Aev
=再
65
QR为再结晶激活能;R 为气体常数。
因为再结晶速率反比于完成一比例再结晶所需时间 τ,即:
1
再v
所以 RT
QR
eA
'1
=
即
TR
Q
A R 1
ln
1
ln '
或 lnln
1 '
RR Q
R
A
Q
R
T
在不同温度下测定发生相同比例再结晶(如 50%)所需时间,其 ln~
1
T
应
为线性关系。测出此直线,则可由直线斜率 m=R/QR得出再结晶激活能。
2.冷变形程度
冷变形度越高,变形贮存能越高,再结晶驱动力越强,
在相同温度下,再结晶速率越快,或在相同再结晶速率条
件下,再结晶温度越低。
当冷变形度达到一定程度(如 70%)后,再结晶温度
下降趋势变缓。这也正是实际再结晶温度必须有较大变形
量前提条件的原因。
3.微量溶质原子
微量溶质原子易偏聚在位错周围钉扎位错运动,使再结晶形核和核长大困
难。因此一般固溶体合金比纯金属再结晶温度高。
4.原始晶粒尺寸
原始晶粒越细,变形抗力越高,贮存能越多。另外,原始晶界面积也越大,
提供弓出形核的地点也会增多。两种因素都会使再结晶温度下降。
5.分散相粒子
当分散相粒子较粗大时,冷变形时位错在粒子周围密度高,即变形贮存能集
中在粒子周围,促进再结晶形核,使再结晶温度降低。
当分散相粒子较细小弥散时,反而阻碍再结晶形核亚晶界及新晶粒大角晶界
的迁移,使再结晶温度升高。
66
四、再结晶后的晶粒度
再结晶后晶粒尺寸 d 对性能有直接影响,主要受再结晶形核率 和晶粒长大
速率 的控制,经验关系式:
N
G
4
1
)(
N
G
d 常数
1.冷变形度
冷变形度 ε很小时,没有局部晶界符合弓出形核能量
条件条件
L
E
2
, =0,故不能再结晶。
N
当 ε=εc(临界变形度),刚符合再结晶形核的能量条
件, 较小,只有较少的再结晶核心生长,导致 d 很大,
晶粒异常粗大。
N
εc称为临界变形度,一般 εc=(2~8)%。
再随 ε的增大, 增大,再结晶形核数量增多,d 下降。
N
当 ε>ε’,再结晶晶粒小于原始晶粒,即使得变形再结晶具有细化晶粒的效果。
2.微量元素和杂质
可产生固溶强化增加贮存能,使 增大;又易偏聚在位错周围钉扎位错和亚
晶界运动,使 下降。两个因素均使 d 下降。
N
G
3.原始晶粒尺寸
原始晶粒越细,变形抗力越高,贮存能越多,使 增大。另外,原始晶界面
积也越大,提供弓出形核的地点也会增多,也使 增大。因此使 d 下降。
N
N
4.变形温度
变形温度高,则变形过程中同时释放的贮存能便较多,导致再结晶时驱动力
减少,使 减小,则 d 增大,即容易使得再结晶晶粒粗化。
N
五、再结晶的应用
再结晶退火。作用:
67
软化组织。在冷变形之间退火,使组织得到软化,便于进一步冷变形,称
中间热处理。
细化组织。将铸态粗大枝晶通过变形再结晶得以细化,同时消除枝晶偏析。
去应力。比去应力退火消除应力作用更有效(如果不需要保留加工硬化)。
§ 8-4 再结晶后的晶粒长大
在回复温度时,冷变形金属中主要是线线缺陷的运动;在再结晶温度时,主
要是亚晶界的运动;在更高的温度条件下,金属内部会趋向于向更稳定的状态发
展,此时面缺陷获得了运动条件,再结晶晶粒的大角晶界便会自发减少,其结果
形成晶粒长大。
晶粒长大驱动力:晶界能的降低。
一、正常长大
1. 晶界迁移规律
无需形核,而是直接的长大。其规律往往是晶界向其曲率中心方向移动和大
晶粒吞食小晶粒。
原因: (1)由于晶界能力图降低,弯曲晶界总有自发变直趋势。
(2)为达到晶界张力平衡,三晶交界处总力图互成 120°。
(3)多边形晶粒一般少于 6 条边的为小晶粒,多余 6 条边的一般为
大晶粒。
三种因素作用结果,使得晶粒长大过程中晶界有上述迁移规律。
68
――――――――――――――――――――――――――――――――――
详细分析(简单了解及参考):
取椭球晶粒沿短轴方向中一扇形柱面,高为 l,短轴半径为 r1,晶
界表面张力为 σ,则界面作用力为 σl。
设想界面弓起是由存在于界面两侧短轴方向的压力差 ΔP 短=PI-
PII引起,则根据界面净力平衡:
PI ·S=PII·S+2σlsin(dθ/2)
当 dθ很小时, sin(dθ/2)≈dθ/2,且表面积 S
=l·r1dθ,代入前式得到
ΔP 短=PI-PII=σ/r1
再沿长轴取扇形柱面,同样处理得到在在长
轴表面上有 ΔP 长=σ/r2
总压力差为 ΔP=P 长+P 短=σ/r1+σ/r2
若为简化,将晶粒近似看做球形,即有 r=r1=r2,
因此有 ΔP=2σ/r
在等温条件下,dT=0,则有 dμ=VdP。假定界面两侧比容 V 相同,则通过由晶粒 I 至
晶粒 II 的界面积分得到 Δμ=μI-μII=VΔP
即 μI-μII=VΔP=2Vσ/r
称为 Gibbs-Thompson 方程。由此可见:
(1) 弯曲晶界两侧存在压力差,且以曲率中心所在晶粒(晶粒 I)应力大。
69
(2) 压力差实质是化学位差,即曲率中心所在晶粒原子化学位高,并随曲率半径减
小而增大。
(3) 化学位差使原子由高化学位晶粒迁移至低化学位晶粒,即由晶界凹侧移向凸侧,
由此造成晶界向曲率中心方向移动。
―――――――――――――――――――――――――――――――――――――
―――――
2.晶粒的稳定形状
当晶界均为六边形及平直时,晶粒失去迁移驱动力,达到平衡状态。因此,
在二维方向上,晶粒稳定形态为正六边形,三维空间为正 14 面体。
但实际上因各种原因,实际晶粒的稳定形状一般不是标准的规则六边形。
二、异常长大
也称二次再结晶。再结晶晶粒不是均匀长大,而是个别较大晶粒优
先生长,吞食周围小晶粒,生长速率远快于其它晶粒,形成粗大组织或
粗细极不均匀的混晶组织。
原因:
若存在使晶界各处迁移率不均匀的因素,则某些易迁移的晶界便首先移动,
其晶粒可优先长大,与周围晶粒尺寸差距越来越大,则生长速率便也越来越大。
使晶界迁移速率不均匀的因素:
第二相质点。若某些晶界被第二相颗粒钉扎,某些晶界未
受钉扎,而未被钉扎晶界的晶粒则优先迅速长大。
表面热蚀沟。薄板表面晶界重合处在高温下为达到张力平
衡,一些原子被热蚀,形成热蚀沟,牵制热蚀沟处晶界的移动。
而不受热蚀沟牵制的晶界可优先移动。
再结晶织构。若再结晶时形成再结晶织构,晶粒之间取向差较小,晶界比较
稳定,仅一些取向差仍然较大的晶界优先移动。
§ 8-5 再结晶退火后的组织
70
一、再结晶退火后的晶粒大小
决定再结晶退火后晶粒大小的工艺参数主要是变形程度和退火温度。变形程
度越大,退火晶粒越小,退火温度越高,晶粒越粗,还可能发生二次再结晶。
工业纯铝的变形程度-退火温度-晶粒大小三者关系见图 11-45(p.312)。
二、再结晶织构
再结晶引起的晶粒择优取向排列。再结晶织构与变形织构可以相同也可以不
相同。
原因:(1)择优形核理论。由于变形织构存在,再结晶形核位向仍保持原有
织构位向,可以解释与变形织构相同的再结晶织构形成机制。
(2)择优成长理论。由于变形织构存在,大多数晶粒位向相近,再结
晶形核位向若与这些晶粒位向相近,则晶界迁移速率较低,仅有某些特殊位向的
再结晶晶核长大速率较快,晶界迁移速率高, 终使再结晶组织具有织构。
再结晶织构同样会造成性能的各向异性。
三、退火孪晶
再结晶退火过程中形成的孪晶。
原因:再结晶过程中组织重构时,若发生镜面对称的错排,可形成退火孪晶。
例如,fcc 的(111)晶面再结晶时发生如图方式错排,则
会以 AC及 为孪晶界形成镜面对称,孪晶界之间为孪晶。
错排即形成层错。因此,层错能越低的金属,越易形成
退火孪晶,如 Cu、不锈钢等。
§ 8-6 金属与合金的热加工
一、热加工
定义 1:金属在高温下的塑性变形。
定义 2:金属在再结晶温度以上温度的热加工塑性变形。
温度有了确切定义,如 W 的再结晶温度为 1200°C,而 Pb、Sn 再结晶温度低
71
于室温,不是人为的冷、热感觉。但热加工变形速率均较高,而实际再结晶温度
是 1 小时之内发生再结晶的温度,不是瞬间发生再结晶的温度,因此此定义还不
够准确。
定义 3:金属材料硬化速率等于或低于软化速率的塑性变形。
定义中不包含温度字样,但却是更严格、科学的定义,隐含了更确切的温度
条件。
相应地,冷加工可定义为:金属材料硬化速率大于软化速率的塑性变形。
能够使硬化速率等于或低于软化速率的塑性变形是动态回复和动态再结晶
过程。
动态回复和动态再结晶:塑性变形与回复或再结晶同时进行的过程。
静态回复和静态再结晶:前述的冷变形后的加热过程发生的回复和再结晶。
同时指动态回复及动态再结晶后金属冷却过程中继续发生的回复和再结晶。
二、动态回复
1.真应力-应变曲线
起始应变阶段,随应变增加,应力增大,
出现加工硬化。
均匀应变阶段,随应变增加,加工硬化速
率下降。
稳态流变阶段,加工硬化与动态回复软化
作用基本平衡,应力不再升高。
变形速率越低或变形温度越高,稳定的流变应力越低。
2.动态回复机制
初始变形时位错密度增大使变形应力增高。当位错增殖到一定密度后,在高
温下热激活,位错通过攀移、交滑移转移到新滑移面,再通过异号位错的相互抵
消,实现位错在不断产生的同时也不断消失,达到一定的平衡密度,使塑性流变
持续而变形应力却不升高。
由于需要位错的攀移或交滑移,因此层错能较高的金属容易发生动态回复。
例如铝合金,工业纯铁,锌,镁,锡等。
72
3.特点
组织特点:原始晶粒也形成拉长的纤维状组织,但其中的亚晶粒却为等轴状,
亚晶界更接近多边化形成的位错墙形态,而不是胞状亚结构形态,或位错胞的胞
壁较薄。亚晶粒内部位错密度较低。等轴亚晶随变形温度升高及应变速率下降而
增大。
性能特点:类似于去应力退火后(高温回复)金属的性能水平,存在加工硬
化效果。
73
三、动态再结晶
1.真应力-应变曲线
起始阶段,加工硬化。
应力达到峰值后,软化大于硬化。
应变一定程度后,软化与硬化交互发生,应力达到动
态平衡。
应变速率越高及变形温度越低,稳定的流变应力越高,
动态平衡阶段应力波动越小。
2.动态再结晶机制
初始应变仍然是位错增多过程。当应变硬化达到一定
程度后,金属中发生再结晶使位错密度显著下降,出现软化。软化金属持续变形硬化和软化
交替进行。
层错能较低的金属因不易发生动态回复,因而易发生动态再结晶。例如,Cu, Ni, Au, Ag,
γ-Fe, 奥氏体不锈钢等。
3.特点
组织特点:晶粒基本等轴状,亚晶粒接近胞状亚结构形态,位错胞的胞壁有
一定厚度。等轴再结晶晶粒尺度随变形温度升高及应变速率下降而增大。
性能特点:由于胞状亚结构的存在,强度高于冷变形后再结晶退火的水平,
即能够保持部分加工硬化效果。
四、热加工的作用
1. 材料成形
2. 改善组织
消除疏松、缩孔,使组织更加致密。通过动态回复和动态再结晶细化组织。
消除偏析。
3. 改善性能
通过改善组织改善性能。
形成合理的流线分布。高速下载:
点击后进入安全下载页,再进行实际下载。下载链接有效期 24 小时,过期会自动刷新。
 WMS仓库系统
WMS仓库系统