概要信息:
科技信息
引言
自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、
冶金、交通、宇航、国防等领域。近年来机器人的智能化水平不断提高,
它大大提高了劳动效率,减轻了人的劳动强度,提高了产品质量,改善了
劳动环境,减少了能源和材料消耗,保证了安全等。
智能小车,即轮式机器人,是移动机器人的一种,其内容涵盖机械、
汽车、电子、自动控制、计算机、传感技术等多个学科的知识领域,作为
一门新兴的综合技术,可广泛的应用于工厂自动料车、固定场地搬运车
等技术领域,也可应用于复杂、恶劣的工作环境,具有良好的民用和军
用应用前景。
1.智能车硬件设计方案
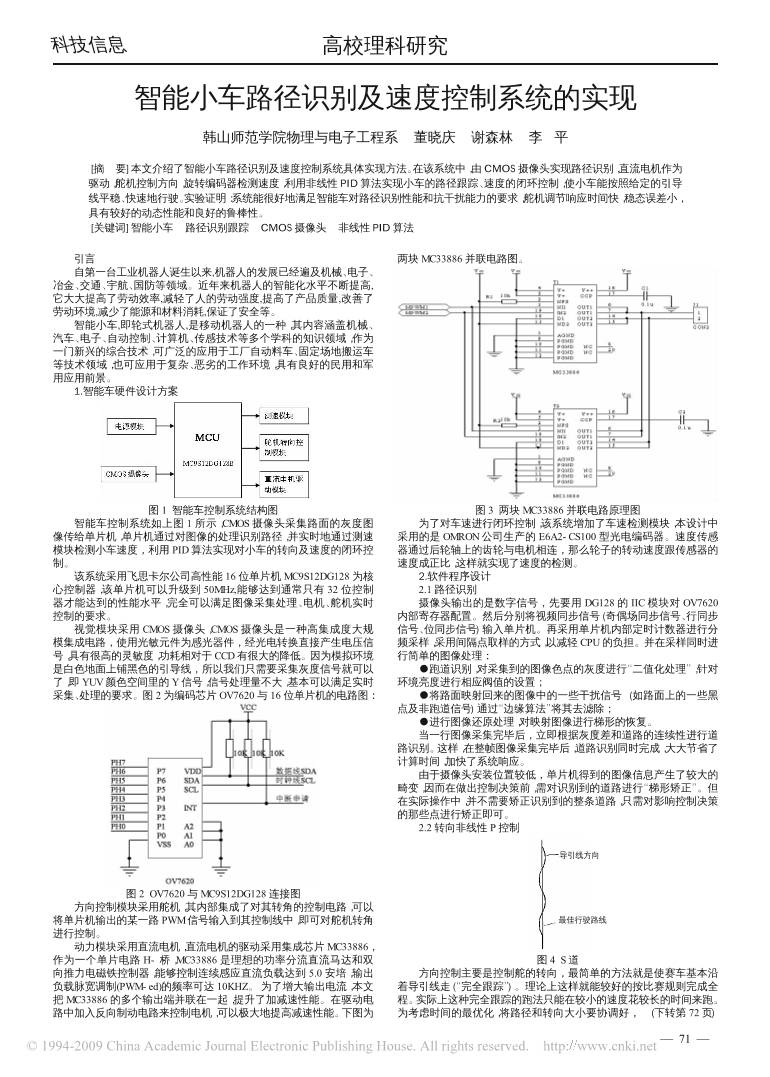
图 1 智能车控制系统结构图
智能车控制系统如上图 1 所示,CMOS 摄像头采集路面的灰度图
像传给单片机,单片机通过对图像的处理识别路径,并实时地通过测速
模块检测小车速度,利用 PID 算法实现对小车的转向及速度的闭环控
制。
该系统采用飞思卡尔公司高性能 16 位单片机 MC9S12DG128 为核
心控制器,该单片机可以升级到 50MHz,能够达到通常只有 32 位控制
器才能达到的性能水平,完全可以满足图像采集处理、电机、舵机实时
控制的要求。
视觉模块采用 CMOS 摄像头,CMOS 摄像头是一种高集成度大规
模集成电路,使用光敏元件为感光器件,经光电转换直接产生电压信
号,具有很高的灵敏度,功耗相对于 CCD有很大的降低。因为模拟环境
是白色地面上铺黑色的引导线,所以我们只需要采集灰度信号就可以
了,即 YUV颜色空间里的 Y信号,信号处理量不大,基本可以满足实时
采集、处理的要求。图 2 为编码芯片 OV7620 与 16 位单片机的电路图:
图 2 OV7620 与 MC9S12DG128 连接图
方向控制模块采用舵机,其内部集成了对其转角的控制电路,可以
将单片机输出的某一路 PWM信号输入到其控制线中,即可对舵机转角
进行控制。
动力模块采用直流电机,直流电机的驱动采用集成芯片 MC33886,
作为一个单片电路 H- 桥,MC33886 是理想的功率分流直流马达和双
向推力电磁铁控制器,能够控制连续感应直流负载达到 5.0 安培,输出
负载脉宽调制(PWM- ed)的频率可达 10KHZ。为了增大输出电流,本文
把 MC33886 的多个输出端并联在一起,提升了加减速性能。在驱动电
路中加入反向制动电路来控制电机,可以极大地提高减速性能。下图为
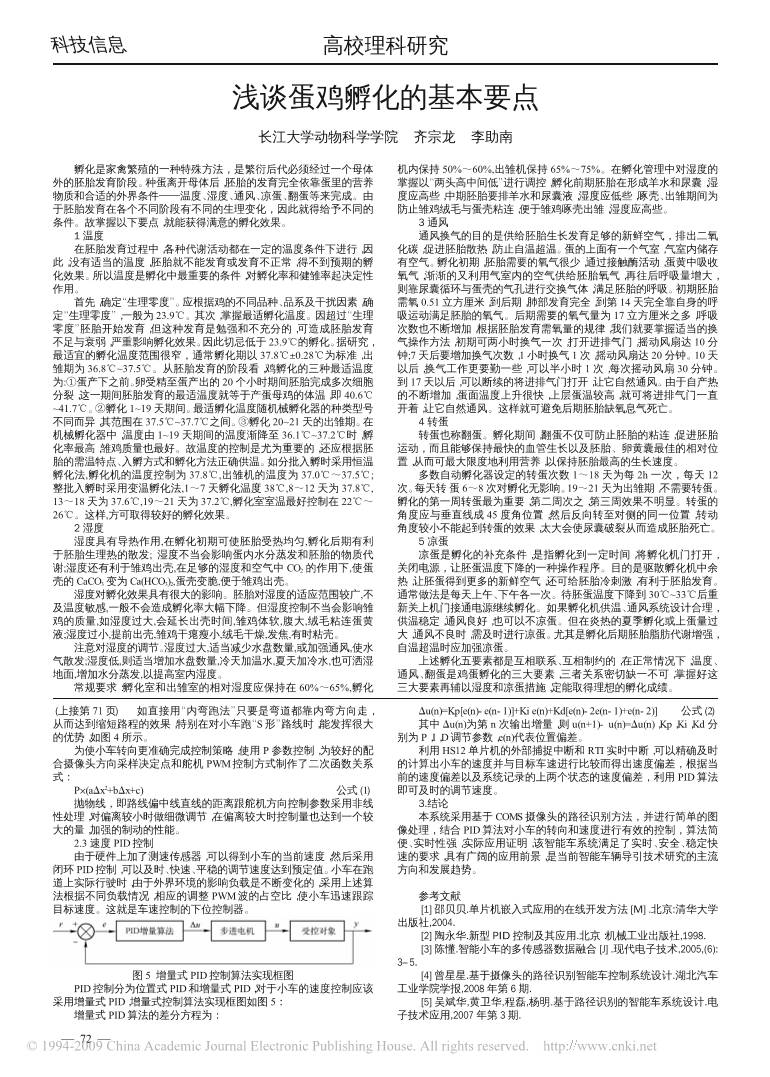
两块 MC33886 并联电路图。
图 3 两块 MC33886 并联电路原理图
为了对车速进行闭环控制,该系统增加了车速检测模块,本设计中
采用的是 OMRON 公司生产的 E6A2- CS100 型光电编码器。速度传感
器通过后轮轴上的齿轮与电机相连,那么轮子的转动速度跟传感器的
速度成正比,这样就实现了速度的检测。
2.软件程序设计
2.1 路径识别
摄像头输出的是数字信号,先要用 DG128 的 IIC 模块对 OV7620
内部寄存器配置。然后分别将视频同步信号(奇偶场同步信号、行同步
信号、位同步信号)输入单片机。再采用单片机内部定时计数器进行分
频采样,采用间隔点取样的方式,以减轻 CPU的负担。并在采样同时进
行简单的图像处理:
●跑道识别,对采集到的图像色点的灰度进行“二值化处理”,针对
环境亮度进行相应阀值的设置;
●将路面映射回来的图像中的一些干扰信号 (如路面上的一些黑
点及非跑道信号)通过“边缘算法”将其去滤除;
●进行图像还原处理,对映射图像进行梯形的恢复。
当一行图像采集完毕后,立即根据灰度差和道路的连续性进行道
路识别。这样,在整帧图像采集完毕后,道路识别同时完成,大大节省了
计算时间,加快了系统响应。
由于摄像头安装位置较低,单片机得到的图像信息产生了较大的
畸变,因而在做出控制决策前,需对识别到的道路进行“梯形矫正”。但
在实际操作中,并不需要矫正识别到的整条道路,只需对影响控制决策
的那些点进行矫正即可。
2.2 转向非线性 P 控制
图 4 S道
方向控制主要是控制舵的转向,最简单的方法就是使赛车基本沿
着导引线走(“完全跟踪”)。理论上这样就能较好的按比赛规则完成全
程。实际上这种完全跟踪的跑法只能在较小的速度花较长的时间来跑。
为考虑时间的最优化,将路径和转向大小要协调好,
最佳行驶路线
导引线方向
智能小车路径识别及速度控制系统的实现
韩山师范学院物理与电子工程系 董晓庆 谢森林 李 平
[摘 要]本文介绍了智能小车路径识别及速度控制系统具体实现方法。在该系统中,由 CMOS 摄像头实现路径识别,直流电机作为
驱动,舵机控制方向,旋转编码器检测速度,利用非线性 PID 算法实现小车的路径跟踪、速度的闭环控制,使小车能按照给定的引导
线平稳、快速地行驶。实验证明:系统能很好地满足智能车对路径识别性能和抗干扰能力的要求,舵机调节响应时间快,稳态误差小,
具有较好的动态性能和良好的鲁棒性。
[关键词]智能小车 路径识别跟踪 CMOS 摄像头 非线性 PID 算法
(下转第 72 页)
高校理科研究
71— —
科技信息
如直接用“内弯跑法”只要是弯道都靠内弯方向走,
从而达到缩短路程的效果,特别在对小车跑“S 形”路线时,能发挥很大
的优势,如图 4 所示。
为使小车转向更准确完成控制策略,使用 P 参数控制,为较好的配
合摄像头方向采样决定点和舵机 PWM控制方式制作了二次函数关系
式:
P×(aΔx2+bΔx+c) 公式(1)
抛物线,即路线偏中线直线的距离跟舵机方向控制参数采用非线
性处理,对偏离较小时做细微调节,在偏离较大时控制量也达到一个较
大的量,加强的制动的性能。
2.3 速度 PID控制
由于硬件上加了测速传感器,可以得到小车的当前速度,然后采用
闭环 PID控制,可以及时、快速、平稳的调节速度达到预定值。小车在跑
道上实际行驶时,由于外界环境的影响负载是不断变化的,采用上述算
法根据不同负载情况,相应的调整 PWM波的占空比,使小车迅速跟踪
目标速度。这就是车速控制的下位控制器。
图 5 增量式 PID控制算法实现框图
PID控制分为位置式 PID和增量式 PID,对于小车的速度控制应该
采用增量式 PID,增量式控制算法实现框图如图 5:
增量式 PID算法的差分方程为:
Δu(n)=Kp[e(n)- e(n- 1)]+Ki e(n)+Kd[e(n)- 2e(n- 1)+e(n- 2)] 公式(2)
其中 Δu(n)为第 n 次输出增量,则 u(n+1)- u(n)=Δu(n),Kp,Ki,Kd 分
别为 P,I,D调节参数,e(n)代表位置偏差。
利用 HS12 单片机的外部捕捉中断和 RTI 实时中断,可以精确及时
的计算出小车的速度并与目标车速进行比较而得出速度偏差,根据当
前的速度偏差以及系统记录的上两个状态的速度偏差,利用 PID 算法
即可及时的调节速度。
3.结论
本系统采用基于 COMS 摄像头的路径识别方法,并进行简单的图
像处理,结合 PID算法对小车的转向和速度进行有效的控制,算法简
便、实时性强,实际应用证明,该智能车系统满足了实时、安全、稳定快
速的要求,具有广阔的应用前景,是当前智能车辆导引技术研究的主流
方向和发展趋势。
参考文献
[1]邵贝贝.单片机嵌入式应用的在线开发方法[M].北京:清华大学
出版社,2004.
[2]陶永华.新型 PID 控制及其应用.北京:机械工业出版社,1998.
[3]陈懂.智能小车的多传感器数据融合[J].现代电子技术,2005,(6):
3-5.
[4]曾星星.基于摄像头的路径识别智能车控制系统设计.湖北汽车
工业学院学报,2008 年第 6 期.
[5]吴斌华,黄卫华,程磊,杨明.基于路径识别的智能车系统设计.电
子技术应用,2007 年第 3 期.
(上接第 71 页)
孵化是家禽繁殖的一种特殊方法,是繁衍后代必须经过一个母体
外的胚胎发育阶段。种蛋离开母体后,胚胎的发育完全依靠蛋里的营养
物质和合适的外界条件——温度、湿度、通风、凉蛋、翻蛋等来完成。由
于胚胎发育在各个不同阶段有不同的生理变化,因此就得给予不同的
条件。故掌握以下要点,就能获得满意的孵化效果。
1 温度
在胚胎发育过程中,各种代谢活动都在一定的温度条件下进行,因
此,没有适当的温度,胚胎就不能发育或发育不正常,得不到预期的孵
化效果。所以温度是孵化中最重要的条件,对孵化率和健雏率起决定性
作用。
首先,确定“生理零度”。应根据鸡的不同品种、品系及干扰因素,确
定“生理零度”,一般为 23.9℃。其次,掌握最适孵化温度。因超过“生理
零度”胚胎开始发育,但这种发育是勉强和不充分的,可造成胚胎发育
不足与衰弱,严重影响孵化效果。因此切忌低于 23.9℃的孵化。据研究,
最适宜的孵化温度范围很窄,通常孵化期以 37.8℃±0.28℃为标准,出
雏期为 36.8℃~37.5℃。从胚胎发育的阶段看,鸡孵化的三种最适温度
为:①蛋产下之前。卵受精至蛋产出的 20 个小时期间胚胎完成多次细胞
分裂,这一期间胚胎发育的最适温度就等于产蛋母鸡的体温,即 40.6℃
~41.7℃。②孵化 1~19 天期间。最适孵化温度随机械孵化器的种类型号
不同而异,其范围在 37.5℃~37.7℃之间。③孵化 20~21 天的出雏期。在
机械孵化器中,温度由 1~19 天期间的温度渐降至 36.1℃~37.2℃时,孵
化率最高,雏鸡质量也最好。故温度的控制是尤为重要的,还应根据胚
胎的需温特点、入孵方式和孵化方法正确供温。如分批入孵时采用恒温
孵化法,孵化机的温度控制为 37.8℃,出雏机的温度为 37.0℃~37.5℃;
整批入孵时采用变温孵化法,1~7 天孵化温度 38℃,8~12 天为 37.8℃,
13~18 天为 37.6℃,19~21 天为 37.2℃,孵化室室温最好控制在 22℃~
26℃。这样,方可取得较好的孵化效果。
2 湿度
湿度具有导热作用,在孵化初期可使胚胎受热均匀,孵化后期有利
于胚胎生理热的散发; 湿度不当会影响蛋内水分蒸发和胚胎的物质代
谢;湿度还有利于雏鸡出壳,在足够的湿度和空气中 CO2 的作用下,使蛋
壳的 CaCO3 变为 Ca(HCO3)2,蛋壳变脆,便于雏鸡出壳。
湿度对孵化效果具有很大的影响。胚胎对湿度的适应范围较广,不
及温度敏感,一般不会造成孵化率大幅下降。但湿度控制不当会影响雏
鸡的质量,如湿度过大,会延长出壳时间,雏鸡体软,腹大,绒毛粘连蛋黄
液;湿度过小,提前出壳,雏鸡干瘪瘦小,绒毛干燥,发焦,有时粘壳。
注意对湿度的调节。湿度过大,适当减少水盘数量,或加强通风,使水
气散发;湿度低,则适当增加水盘数量,冷天加温水,夏天加冷水,也可洒湿
地面,增加水分蒸发,以提高室内湿度。
常规要求:孵化室和出雏室的相对湿度应保持在 60%~65%,孵化
机内保持 50%~60%,出雏机保持 65%~75%。在孵化管理中对湿度的
掌握以“两头高中间低”进行调控,孵化前期胚胎在形成羊水和尿囊,湿
度应高些,中期胚胎要排羊水和尿囊液,湿度应低些,啄壳、出雏期间为
防止雏鸡绒毛与蛋壳粘连,便于雏鸡啄壳出雏,湿度应高些。
3 通风
通风换气的目的是供给胚胎生长发育足够的新鲜空气,排出二氧
化碳,促进胚胎散热,防止自温超温。蛋的上面有一个气室,气室内储存
有空气。孵化初期,胚胎需要的氧气很少,通过接触酶活动,蛋黄中吸收
氧气,渐渐的又利用气室内的空气供给胚胎氧气,再往后呼吸量增大,
则靠尿囊循环与蛋壳的气孔进行交换气体,满足胚胎的呼吸。初期胚胎
需氧 0.51 立方厘米,到后期,肺部发育完全,到第 14 天完全靠自身的呼
吸运动满足胚胎的氧气。后期需要的氧气量为 17 立方厘米之多,呼吸
次数也不断增加,根据胚胎发育需氧量的规律,我们就要掌握适当的换
气操作方法,初期可两小时换气一次,打开进排气门,摇动风扇达 10 分
钟;7 天后要增加换气次数,1 小时换气 1 次,摇动风扇达 20 分钟。10 天
以后,换气工作更要勤一些,可以半小时 1 次,每次摇动风扇 30 分钟。
到 17 天以后,可以断续的将进排气门打开,让它自然通风。由于自产热
的不断增加,蛋面温度上升很快,上层蛋温较高,就可将进排气门一直
开着,让它自然通风。这样就可避免后期胚胎缺氧息气死亡。
4 转蛋
转蛋也称翻蛋。孵化期间,翻蛋不仅可防止胚胎的粘连,促进胚胎
运动,而且能够保持最快的血管生长以及胚胎、卵黄囊最佳的相对位
置,从而可最大限度地利用营养,以保持胚胎最高的生长速度。
多数自动孵化器设定的转蛋次数 1~18 天为每 2h 一次,每天 12
次。每天转 蛋 6~8 次对孵化无影响。19~21 天为出雏期,不需要转蛋。
孵化的第一周转蛋最为重要,第二周次之,第三周效果不明显。转蛋的
角度应与垂直线成 45 度角位置,然后反向转至对侧的同一位置,转动
角度较小不能起到转蛋的效果,太大会使尿囊破裂从而造成胚胎死亡。
5 凉蛋
凉蛋是孵化的补充条件,是指孵化到一定时间,将孵化机门打开,
关闭电源,让胚蛋温度下降的一种操作程序。目的是驱散孵化机中余
热,让胚蛋得到更多的新鲜空气,还可给胚胎冷刺激,有利于胚胎发育。
通常做法是每天上午、下午各一次。待胚蛋温度下降到 30℃~33℃后重
新关上机门接通电源继续孵化。如果孵化机供温、通风系统设计合理,
供温稳定,通风良好,也可以不凉蛋。但在炎热的夏季孵化或上蛋量过
大,通风不良时,需及时进行凉蛋。尤其是孵化后期胚胎脂肪代谢增强,
自温超温时应加强凉蛋。
上述孵化五要素都是互相联系、互相制约的,在正常情况下,温度、
通风、翻蛋是鸡蛋孵化的三大要素,三者关系密切缺一不可,掌握好这
三大要素再辅以湿度和凉蛋措施,定能取得理想的孵化成绩。
浅谈蛋鸡孵化的基本要点
长江大学动物科学学院 齐宗龙 李助南
高校理科研究
72— —
 WMS仓库系统
WMS仓库系统