卡尔曼滤波的基本原理及应用.pdf
- 文件大小: 174.13KB
- 文件类型: pdf
- 上传日期: 2025-08-16
- 下载次数: 0
概要信息:
Pseudo-linear Kalman Filter in Passive Target Tracking
Abstract:For only targets tracking,Pseudo-linear Kalman filter algorithm is an effective method of tracking filter.This method can be a
good movement on the target state estimates. The simulation proved that the method reduces the reqwirement of the accuracy about the
model,and has good stability.
Key Words:Pseudo-linear Kalman Filter;Bearings-only;Target Tracking
s),被动雷达的扫描周期为 T=1s,状态噪声为相互独立的零均
值的高斯白噪声,传感器对目标的测量误差均方差分别为:σa=
0,σx=10; 运用本文介绍的伪线性卡尔曼滤波方法对上述运动
目标进行跟踪。 进行蒙特卡洛仿真试验,所得到的位置滤波结
果和速度方向上的均方误差,见如图 2 到图 5。
4 结束语
采用伪线性卡尔曼滤波算法,在参数估计的收敛速度和收
敛精度上有明显的改善,在很大程度上克服了非线性问题线性
化时,线性化误差导致的不良结果。通过伪量测变量的引入,对
量测矩阵进行重新构造, 使得系统量测矩阵是量测角的函数,
并且具有线性形式。 该算法降低了对模型精度的要求,改进了
扩展卡尔曼滤波的发散问题,具有较好的稳定性,在一定的误
差范围内可以快速实现对空间目标定位。但伪线性卡尔曼滤波
算法存在稳态有偏估计的问题,这有待于进一步研究解决。
参考文献:
[1] 郭福成,孙仲康,安玮.对运动辐射源的单站无源伪线性定位跟踪
算法[J].宇航学报,2002(5).
[2] 程咏梅.主/被动传感器自适应协同跟踪算法研究[D].西北工业
大学,2001.
[3] 钟晓军,王国宏,等.伪线性滤波在导弹纯方位跟踪中的应用[J].
飞航导弹,2004(5).
[4] AIDALA V.J.Kalman behavior in bearings -only tracking applica-
tions.IEEE Trans.On AES,Vol.15,No.1,1979:29-39.
[5] 许耀伟,周一宇,孙仲康.引入测频信息对运动辐射源进行无源被
动定位的研究[J].电光与控制,1998(4).
(责任编辑:卓 光)
卡尔曼滤波的基本原理及应用
彭丁聪
(中国地质大学 研究生院,湖北 武汉 430074)
摘 要:卡尔曼滤波在信号处理与系统控制领域应用广泛,目前,正越来越广泛地应用于计算机应用的各个领域。 为
了更好地理解卡尔曼滤波的原理与进行滤波算法的设计工作,主要从两方面对卡尔曼滤波进行阐述:基本卡尔曼滤
波系统模型、滤波模型的建立以及非线性卡尔曼滤波的线性化。 最后,对卡尔曼滤波的应用做了简单介绍。
关键词:卡尔曼滤波;系统模型;线性化
中图分类号:TP319 文献标识码:A 文章编号:1672-7800(2009)11-0032-03
0 引言
1960 年,卡尔曼发表了用递归方法解决离散数据线性滤波
问题的论文(A New Approach to Linear Filtering and Prediction Pro
blems)。在这篇文章里,一种克服了维纳滤波缺点的新方法被提出
来,这就是我们今天称之为卡尔曼滤波的方法。卡尔曼滤波应用广
泛且功能强大,它可以估计信号的过去和当前状态,甚至能估计将
来的状态,即使并不知道模型的确切性质。
本质上来讲,滤波就是一个信号处理与变换(去除或减弱
不想要的成分,增强所需成分)的过程,这个过程既可以通过硬
作者简介:彭丁聪(1983-),男,湖南隆回人,中国地质大学研究生院硕士研究生,研究方向为数据挖掘、智能计算。
软 件 导 刊
Software Guide
第8卷%第11期
2009年 11月
Vol.8 No.11
Nov. 2009
第 11 期
件来实现,也可以通过软件来实现。 卡尔曼滤波属于一种软件
滤波方法,其基本思想是:以最小均方误差为最佳估计准则,采
用信号与噪声的状态空间模型,利用前一时刻的估计值和当前
时刻的观测值来更新对状态变量的估计,求出当前时刻的估计
值,算法根据建立的系统方程和观测方程对需要处理的信号做
出满足最小均方误差的估计。
1 离散线性卡尔曼滤波
最初的卡尔曼滤波算法被称为基本卡尔曼滤波算法,适用
于解决随机线性离散系统的状态或参数估计问题。
1.1 建立系统数学模型
在实际应用中,我们可以将物理系统的运行过程看作是一
个状态转换过程,卡尔曼滤波将状态空间理论引入到对物理系
统的数学建模过程中来,其假设系统状态可以用 n 维空间的一
个向量 X∈R
n
来表示。为了描述方便,我们作以下假设:①物理
系统的状态转换过程可以描述为一个离散时间的随机过程;②
系统状态受控制输入的影响;③系统状态及观测过程都不可避
免受噪声影响;④对系统状态是非直接可观测的。
在以上假设前提下,定义系统状态变量为 Xk∈R
n
,系统控
制输入为 Uk ,系统过程激励噪声为 Wk ,可得出系统的状态随
机差分方程
[4]
为:
Xk=AXk-1 +BUk+Wk (1)
定义观测变量 Zk∈R
m
,观测噪声为 Vk ,得到量测方程:
Zk=HXk+Vk (2)
假设 Wk ,Vk 为相互独立,正态分布的白色噪声,过程激励
噪声协方差矩阵为 Q,观测噪声协方差矩阵为 R,即:
Wk∽N(0,Q) (3)
Vk∽N(0,R) (4)
A,B,H 我们统称为状态变换矩阵, 是状态变换过程中的
调整系数,是从建立的系统数学模型中导出来的,这儿我们假
设它们是常数。
1.2 滤波器计算原型
从建立的系统数学模型出发,可以导出卡尔曼滤波的计算
原型,包括:时间更新方程和测量更新方程。 为了便于描述,做
以下说明:(1)X赞 k∈R
n
,第 k 步之前的状态已知的情况下第 k 步
的先验状态估计值(-代表先验, 代表估计);(2)X赞 k∈R
n
,测量
变量 Zk 已知情况下第 k 步的后验状态估计值。 由此定义先验
估计误差和后验估计误差:
Ek
-=Xk-X赞 k- (5)
Ek=Xk-X赞 k (6)
先验估计误差的协方差矩阵为:
Pk-=E(Ek
-Ek
-T) (7)
后验估计误差的协方差矩阵为:
Pk=E(EkEk
T
) (8)
式(9)构造了卡尔曼滤波器的表达式:先验估计X赞 k
-和加权
的测量变量 Zk 及其预测 HX赞 k-之差的线性组合构成了后验状态
估计X赞 k:
X赞 k=X赞 k-+K(Zk-X赞 k-) (9)
式中测量变量及其预测值之差(Zk -X赞 k
-)反映了预测值和
实际值之间的不一致程度,称为测量过程的残余。 n×m 阶矩阵
K 叫做残余的增益,作用是使(1.8)式中的后验估计误差协方
差最小。 可以通过以下步骤求出 K:将(1.9)式代入(1.6)式代入
(1.8)式,将 Pk 对 K 求导,使一阶导数为零,可以求出 K(具体推
导过程参见文献 [5]),K 的一种形式为:
Kk=Pk
-HT(HPk
-HT+R)-1 (10)
对 卡 尔 曼 增 益 K 的 确 定 是 建 立 滤 波 模 型 的 关 键 步 骤 之
一,它能显著影响模型的效率。
1.3 滤波器模型的建立
卡尔曼滤波器包括两个主要过程:预估与校正。 预估过程
主要是利用时间更新方程建立对当前状态的先验估计,及时向
前推算当前状态变量和误差协方差估计的值,以便为下一个时
间状态构造先验估计值;校正过程负责反馈,利用测量更新方
程在预估过程的先验估计值及当前测量变量的基础上建立起
对当前状态的改进的后验估计。 这样的一个过程,我们称之为
预估-校正过程,对应的这种估计算法称为预估-校正算法。 以
下给出离散卡尔曼滤波的时间更新方程和状态更新方程。
时间更新方程:
X赞 k-=AX赞 k-1+BU赞 k-1 (11)
Pk
-=APk-1AT+Q (12)
状态更新方程:
Kk=Pk
-HT(HPk
-HT+R)-2 (13)
X赞 k=X赞 k-+Kk(Zk-HX赞 k-) (14)
Pk=(I-KkH)Pk
- (15)
在上面式中,各量说明如下:
A:作用在 Xk-1 上的 n×n 状态变换矩阵
B:作用在控制向量 Uk-1 上的 n×1 输入控制矩阵
H:m×n 观测模型矩阵, 它把真实状态空间映射成观测空
间 Pk
-:为 n×n 先验估计误差协方差矩阵 Pk:为 n×n 后验估计误
差协方差矩阵 Q:n×n 过程噪声协方差矩阵 R:m×m 过程噪声
协方差矩阵 I:n×n 阶单位矩阵 Kk:n×m 阶矩阵, 称为卡尔曼增
益或混合因数,作用是使后验估计误差协方差最小前面描述的
卡尔曼滤波器估计一个用线性随机差分方程描述的随机过程
的状态变量 Xk∈R
n
,那么对于系统模型是非线性的情形,又该
怎么做呢? 扩展的卡尔曼滤波(Extended Kalman Filter)器给出
彭丁聪:卡尔曼滤波的基本原理及应用 33· ·
2009 年软 件 导 刊
Basic Principle and Application of Kalman Filter
Abstract:Kalman Filtering has been widely used in the field of signal processing and system control since many years ago. And now,it is
adopted widely in the field of computer science. In order to understand the basic principal of Kalman Filtering well and give a good
support on the algorithm design work of it,this paper mainly introduces it from two aspects:how to build system models and filtering
models of Kalman Falter, and how to deal with the linearization of the nonlinear kalman filtering. Finally,a brief introduction on the
applications of Kalman Filtering is depicted.
Key Words:Kalman Filter;System Model;Linearization
这种情形的一种解法,同 Talyer 级数类似,面对非线性关系时,
我们可以通过求过程方程和量测方程的偏导来线性化 [4、5],并
计算当前估计量。 不同于基本卡尔曼滤波(KF)过程,扩展卡尔
曼滤波(EKF)过程 中 的 因子 矩 阵(A,W,H,K)是 时 刻 变化 的,
因此加下标 k(k 表示 k 时刻)以示标记。 扩展滤波器(EKF)的
基本工作步同基本滤波器的工作步一样,两者的主要区别在于
非线性情形下需要进行线性化处理,且因子矩阵一般都随时间
变化(与时刻 k 有关)。 但是值得注意的是,经线性变换后系统
噪声及量测噪声不再服从高斯分布。
2 卡尔曼滤波的应用
卡尔曼滤波器(Kalman Filter)是一个最优化自回归数据处
理 算 法 (optimal recursive data processing algorithm),它 的 广 泛
应用已经超过 30 年,包括航空器轨道修正、机器人系统控制、
雷达系统与导弹追踪等。近年来更被应用于组合导航与动态定
位,传感器数据融合、微观经济学等应用研究领域。特别是在图
像处理领域如头脸识别、图像分割、图像边缘检测等当前热门
研究领域占有重要地位。
卡尔曼滤波作为一种数值估计优化方法,与应用领域的背
景结合性很强。 因此在应用卡尔曼滤波解决实际问题时,重要
的不仅仅是算法的实现与优化问题,更重要的是利用获取的领
域知识对被认识系统进行形式化描述, 建立起精确的数学模
型,再从这个模型出发,进行滤波器的设计与实现工作。
滤波器实际实现时, 测量噪声协方差 R 一般可以观测得
到,是滤波器的已知条件。 它可以通过离线获取一些系统观测
值计算出来。 通常,难确定的是过程激励噪声协方差的 Q 值,
因为我们无法直接观测到过程信号。一种方法是通过设定一个
合适的 Q,给过程信号“注入”足够的不确定性来建立一个简单
的可以产生可接受结果的过程模型。 为了提高滤波器的性能,
通常要按一定标准进行系数的选择与调整。
基本卡尔曼滤波(KF)器限定在线性的条件下,在大多数
的非线性情形下,我们使用扩展的卡尔曼滤波(EKF)器来对系
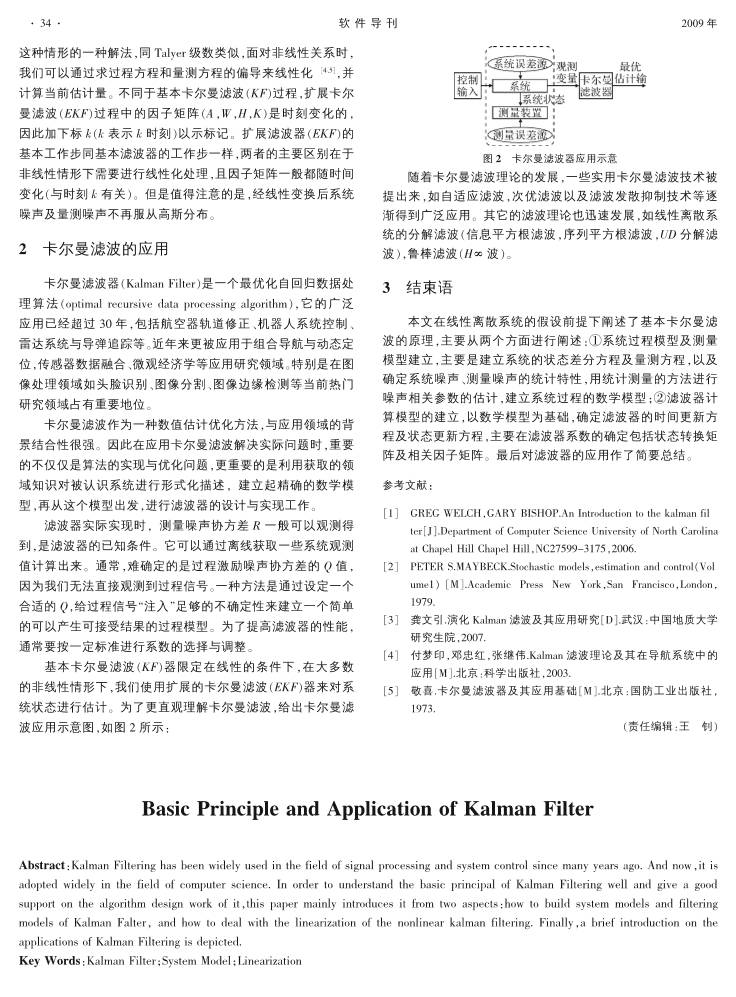
统状态进行估计。 为了更直观理解卡尔曼滤波,给出卡尔曼滤
波应用示意图,如图 2 所示:
图 2 卡尔曼滤波器应用示意
随着卡尔曼滤波理论的发展,一些实用卡尔曼滤波技术被
提出来,如自适应滤波,次优滤波以及滤波发散抑制技术等逐
渐得到广泛应用。 其它的滤波理论也迅速发展,如线性离散系
统的分解滤波(信息平方根滤波,序列平方根滤波,UD 分解滤
波),鲁棒滤波(H∞ 波)。
3 结束语
本文在线性离散系统的假设前提下阐述了基本卡尔曼滤
波的原理,主要从两个方面进行阐述:①系统过程模型及测量
模型建立,主要是建立系统的状态差分方程及量测方程,以及
确定系统噪声、测量噪声的统计特性,用统计测量的方法进行
噪声相关参数的估计,建立系统过程的数学模型;②滤波器计
算模型的建立,以数学模型为基础,确定滤波器的时间更新方
程及状态更新方程,主要在滤波器系数的确定包括状态转换矩
阵及相关因子矩阵。 最后对滤波器的应用作了简要总结。
参考文献:
[1] GREG WELCH,GARY BISHOP.An Introduction to the kalman fil
ter[J].Department of Computer Science University of North Carolina
at Chapel Hill Chapel Hill,NC27599-3175,2006.
[2] PETER S.MAYBECK.Stochastic models,estimation and control(Vol
ume1) [M].Academic Press New York,San Francisco,London,
1979.
[3] 龚文引.演化 Kalman 滤波及其应用研究[D].武汉:中国地质大学
研究生院,2007.
[4] 付梦印,邓忠红,张继伟.Kalman 滤波理论及其在导航系统中的
应用[M].北京:科学出版社,2003.
[5] 敬喜 .卡尔曼滤波器及其应用基础[M].北京:国防工业出 版 社,
1973.
(责任编辑:王 钊)
34· ·
高速下载:
点击后进入安全下载页,再进行实际下载。下载链接有效期 24 小时,过期会自动刷新。
 WMS仓库系统
WMS仓库系统